

Although biped and quadruped robots may excel at traversing uneven terrain, they require multiple sensors and complex algorithms in order to do so. Scientists have now taken a "simpler" approach, by creating a robotic centipede.
Led by physics postdoctoral researcher Baxi Chong, a team at the Georgia Institute of Technology (Georgia Tech) designed the robot for usage scenarios in which sensors might be too fragile/expensive, or in which environmental conditions may change too quickly for control systems to adapt.
The scientists were inspired by a communication theory put forth in 1948 by mathematician Claude Shannon, which (among other things) suggested that in order to transmit a message over a long distance on a noisy line, that message should be broken up into repeating redundant units.
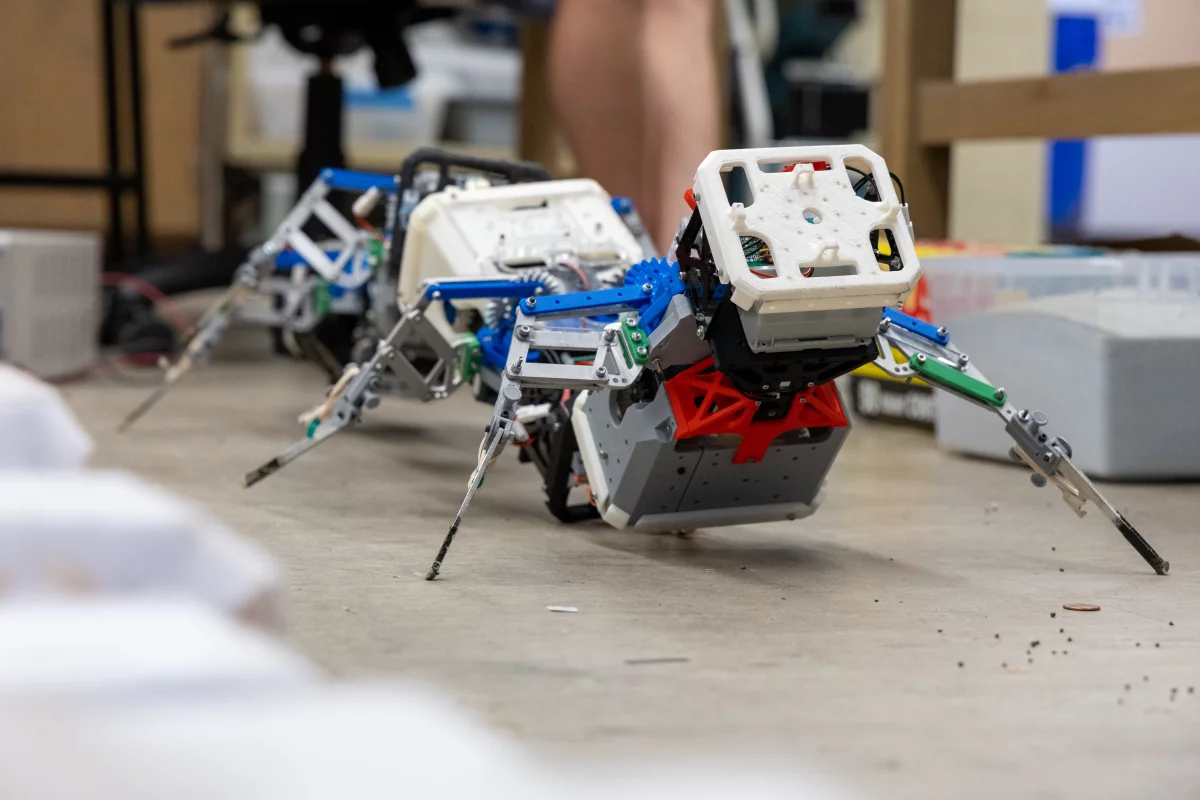
In the case of the robot, those units took the form of legs. PhD student Juntao He and master's student Daniel Soto started out with a robot with six legs, which had to make its way over an uneven surface designed to mimic a chaotic natural environment. After each run, the scientists added additional pairs of legs, until the robot ultimately had a total of 16 legs.
It was found that as the robot gained more legs, it became increasingly better at getting over the obstacles. Importantly, it did so without the use of any sensors or adaptive programming. Instead, it just relied on the fact that if one or even a few of its legs were to falter, there would still be plenty of others to keep it moving.
Needless to say, at some point the costs of multiple legs will outweigh the benefits. The scientists have yet to determine where that point is, for different robots performing different tasks in different environments.
"In this paper, we asked, 'How do you predict the minimum number of legs to achieve such tasks?'" said Chong. "Currently we only prove that the minimum number exists, but we don't know that exact number of legs needed. Further, we need to better understand the tradeoff between energy, speed, power, and robustness in such a complex system."
Plans now call for the technology to be incorporated into an agricultural weed-pulling robot.
A paper on the research was recently published in the journal Science. The robot can be seen in action, in a video on Georgia Tech's website.
Source: Georgia Tech via EurekAlert





