



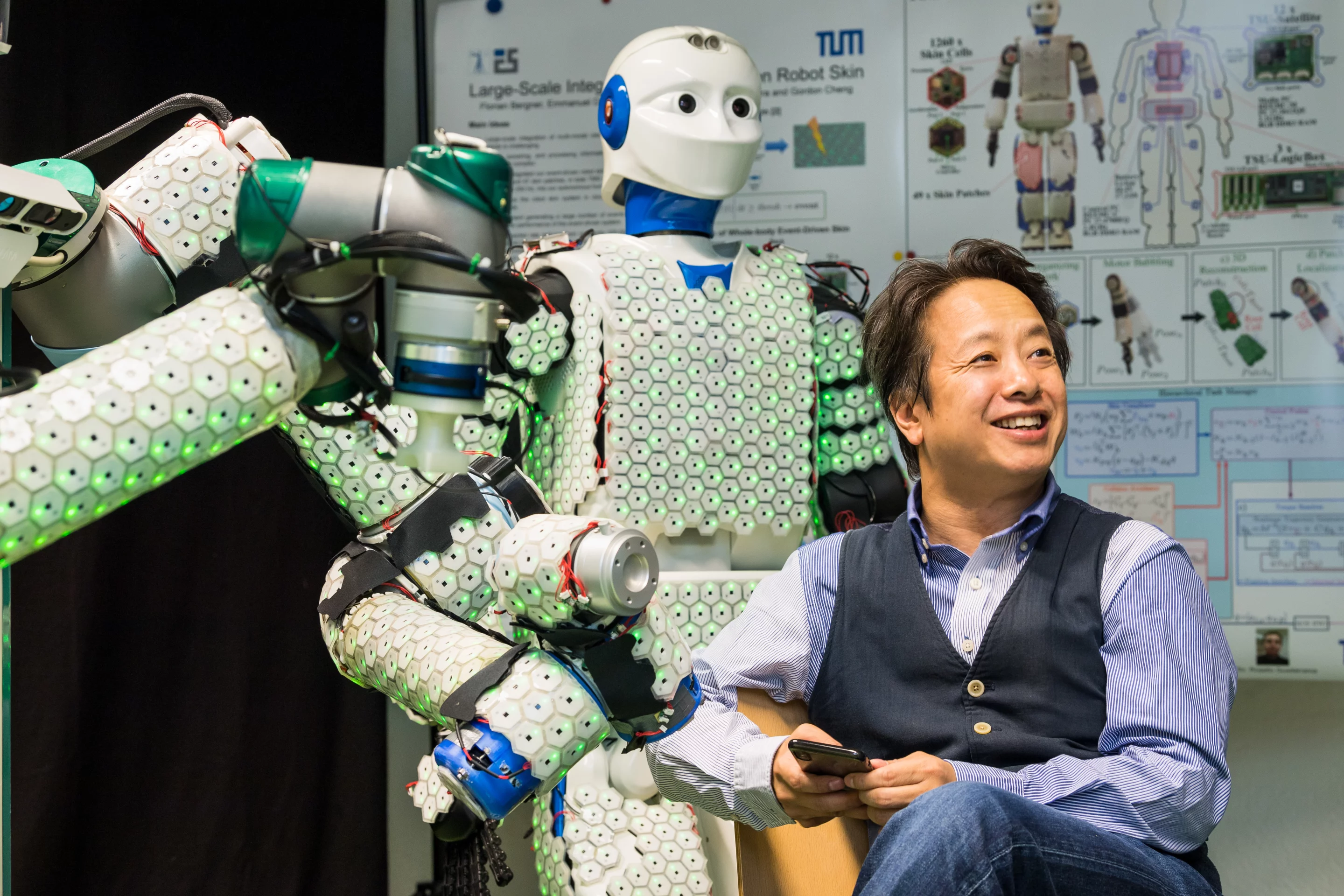

Back in 2011 we looked at an array of small hexagonal plates created to serve as an electronic skin that endows robots with a sense of touch. The team responsible had placed 31 of these hexagonal "skin cells" on a small robot, but now they've gone a lot further, equipping a human-sized robot with 1,260 cells to create what they claim is the first autonomous humanoid robot with artificial skin covering its entire body – even the soles of its feet.
In the eight years since the original touchy-feely robot, Professor Gordon Cheng and his team at the Technical University of Munich (TUM) have refined the look of the individual sensor cells, but they still boast the same basic capabilities. They're still hexagonal in shape, allowing them to be placed in a honeycomb arrangement, and they can still measure proximity, pressure, temperature and acceleration.
But the main hurdle the team faced in expanding the number of cells so as to fully cover a human-sized robot was computing power, and it's here that the team is claiming a breakthrough. Continuously processing data from more than a few hundred sensors quickly overloaded previous systems, so the team took inspiration from an approach employed by the human nervous system.
Rather than constantly informing us of every single sensation our skin feels at all times, the human nervous system concentrates on new sensations. The team gives the example of wearing a hat – we notice it when we put the hat on, but quickly become accustomed the feeling of it on our head and don't notice it after a while. Then, if the hat is blown off, for example, we notice the change.
This kind of "event-based" approach requires much less processing power, and the TUM team have managed to adapt it to their robotic skin, making it possible to cover an entire robot without requiring impractical amounts of computing power.

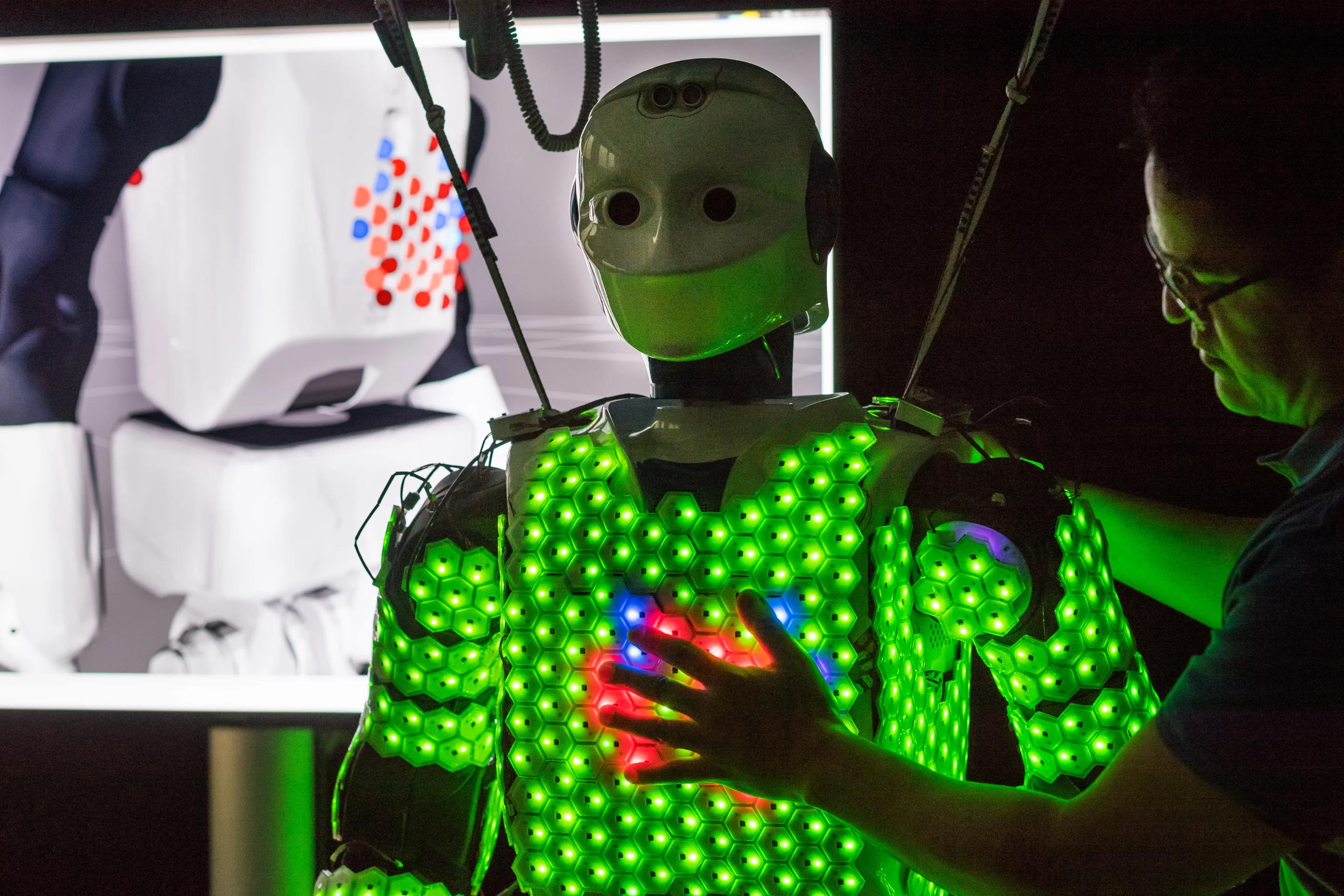
The team's H-1 robot is covered in 1,260 hexagonal cells, providing a total of over 13,000 different sensors. These are positioned on its upper body, arms, legs and the soles of its feet. This allows the robot to balance on one leg and walk on uneven surfaces. It can also give a person a hug without crushing them, which actually requires more calculations than many people realize due to the large number of contact points between the two huggers and the varying pressures.
"This might not be as important in industrial applications, but in areas such as nursing care, robots must be designed for very close contact with people," says Cheng.
Additionally, thanks to its multicellular construction, the artificial skin will keep working even if some cells stop functioning.
The current skin cells are about one inch (2.5 cm) in diameter, but Cheng says the team is now working to make them smaller and increase the potential for them to be produced in large numbers.
You can see the H-1 robot getting touchy feely in the video below.
Source: Technical University of Munich





