
Researchers have developed an ultrasensitive, human-like robotic ‘finger’ capable of safely performing routine physical examinations like a medical doctor would. They say the ‘robodoctor’ could be seen in medical clinics soon.
Doctors’ fingers are diagnostic tools used to learn all sorts of things about you and your health. Fingers are used by medical professionals to, for example, take your pulse, to feel around for abnormal lumps in tissues under the skin, and they’re inserted into, well, dark, warm places for diagnostic purposes.
Now, researchers from the Department of Precision Machinery and Precision Instrumentation at the University of Science and Technology of China (USTC) have created a human-inspired, bendable robotic ‘finger’ to perform routine medical examinations like those listed above.
“Physical examination is one of the most widely available, effective, and safe approaches for detecting early findings of lumps and other signs of breast cancer,” said the researchers. “In traditional Chinese medicine, doctors can take a patient’s pulse at the wrist … to understand his or her cardiac conditions.
“On the one hand, due to the lack of trained, experienced physicians, some diseases or potential risks might not be identified in time to prevent aggravation. On the other hand, a large percentage of individuals are unwilling to undergo physical examination, particularly those who are being examined by a doctor of the opposite gender. Thus, robotic palpation has attracted intense attention in the research community.”
Given the complexities of the human hand, even the most advanced robotic hands are still well behind in matching its capabilities. So, for the USTC team to achieve comparable-to-human tactile sensing for palpation – which is feeling about for abnormalities – and proprioception – the ability to sense the movement and location of our body parts – in a soft robotic finger is a pretty big deal.
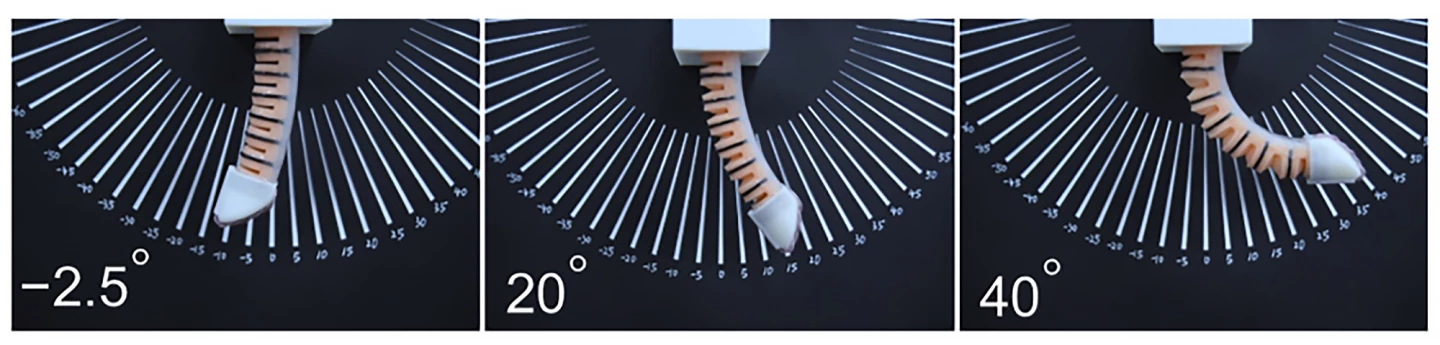
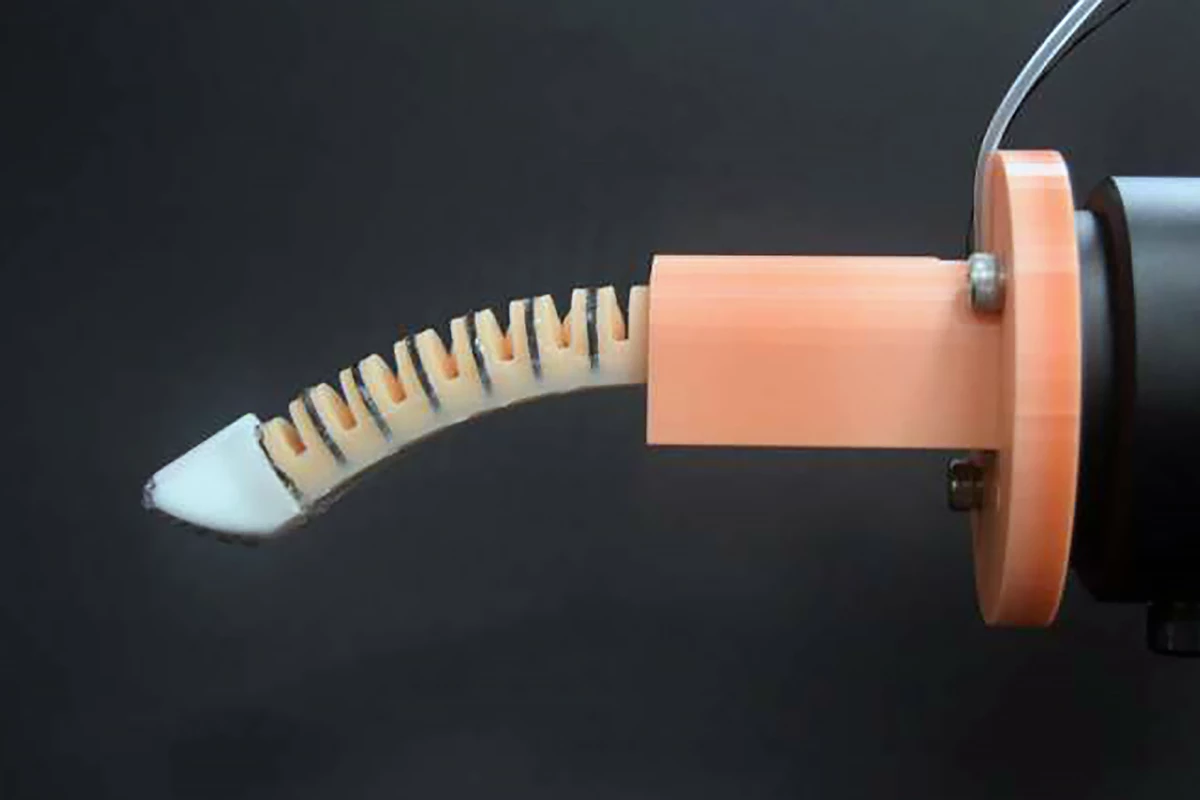
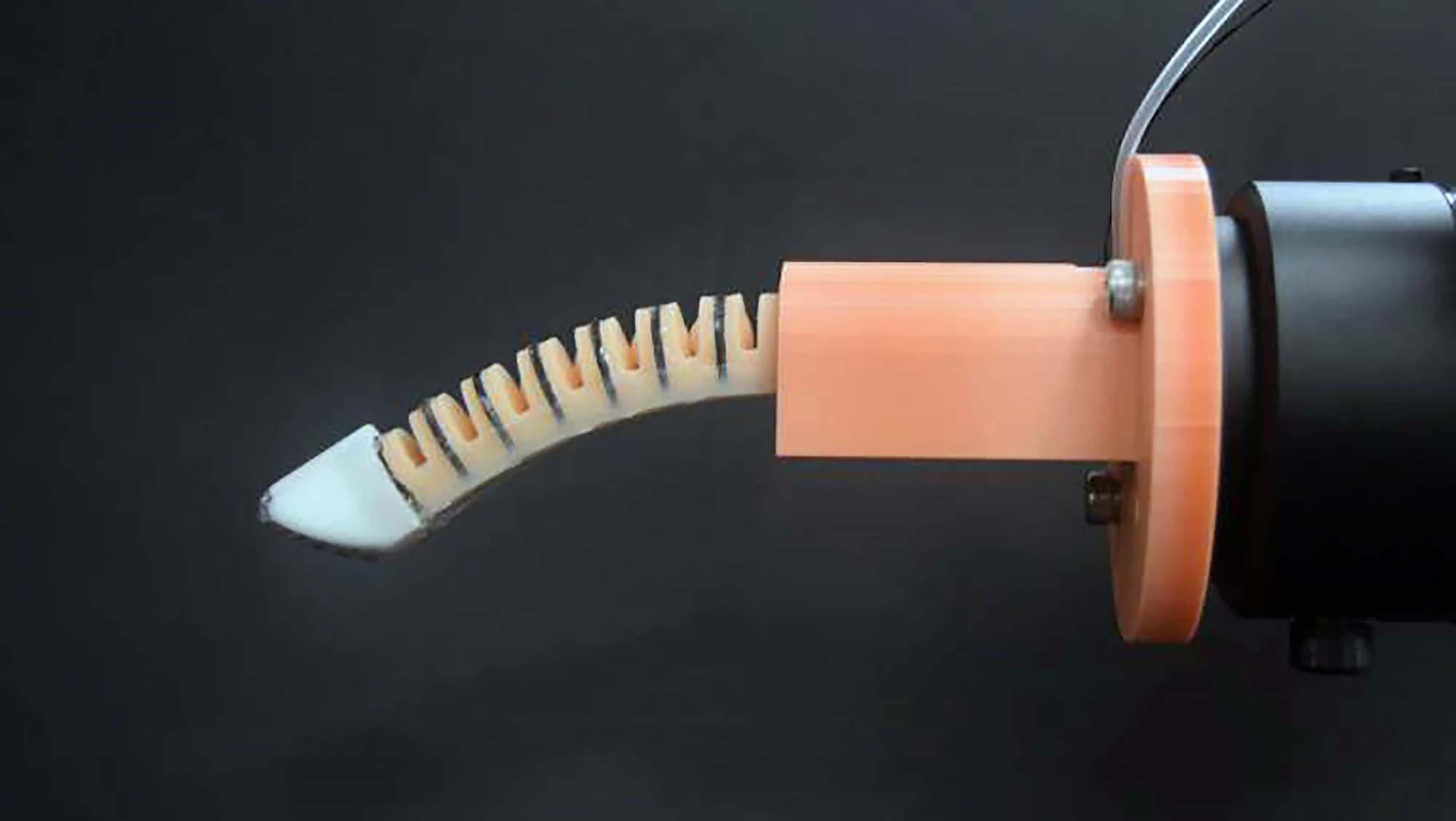
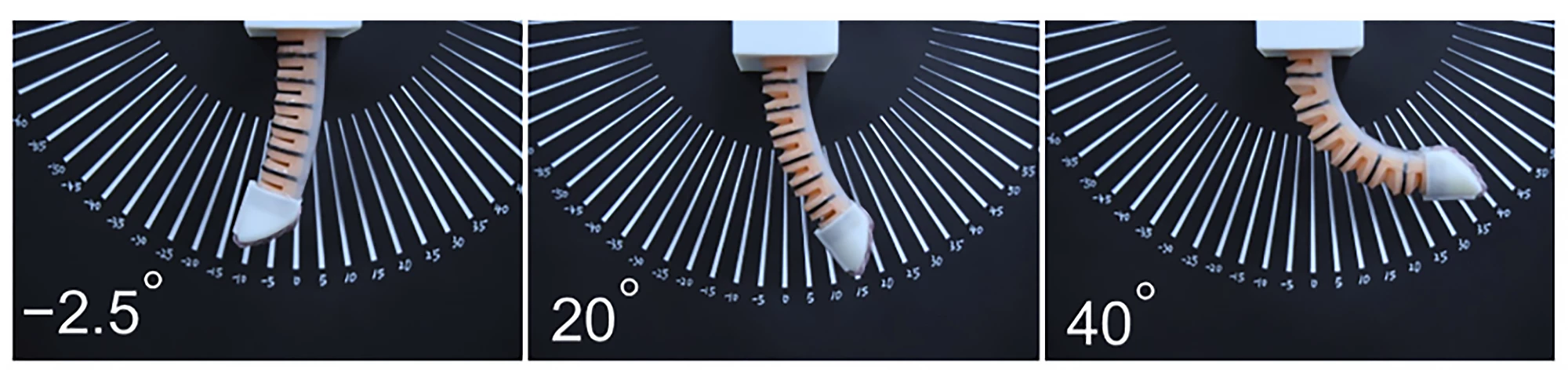
Their BSF, short for bioinspired soft finger, consists of a bending actuation body and integrated multimodal sensing. It has a finger-like, semicircular shape with a PneuNet (pneumatic networks) structure, a class of soft actuator made up of a series of channels and chambers inside an elastomer. The BSF bends inward when it’s pressurized as these air chambers expand. Its total length is 129 mm (5.08 inches).
“The proposed BSF has a simple design and requires only measuring the resistance and inductance at two terminals to achieve human-like touch perception,” the researchers explain. “Like our human finger, the BSF can perceive rich information on the physical properties of objects via active touch.”
The researchers tested how their BSF fared performing medical palpation as a doctor would. It could search for and recognize model lumps in some model tissue across a large area. Furthermore, the ‘robofinger’ successfully found an artery in a human participant’s wrist and measured their pulse. There was no mention in the study of whether the finger was used to perform any type of invasive prognostication.
“We demonstrated that the BSF can press and ‘feel’ the stiffness of an object and perform safe and accurate robotic palpation similar to that performed by a doctor,” said the researchers. “Moreover, the BSD mounted on a [six-degrees-of-freedom] robotic arm can locate the artery at a participant’s wrist and take [pulses] for real-time analysis. These findings highlight the potential of a ‘robodoctor’ to perform physical examinations in the future.”
At least it’s unlikely that the BSF will run into the problem of having cold hands.
The study was published in the journal Cell Reports: Physical Science.



