


Engineers have used a variety of techniques to create robots that can scale walls – “the Climber” uses a rolling seal, while the insect-like robots from SRI have caterpillar tracks with electro-adhesive properties. While such robots generally focus on speed, adhering to the wall and deciding how and when to move, the creators of a small robot named ROCR say it is the first wall-climbing robot to focus on climbing efficiently. And it does so by using the momentum of a tail that swings like a grandfather clock’s pendulum.
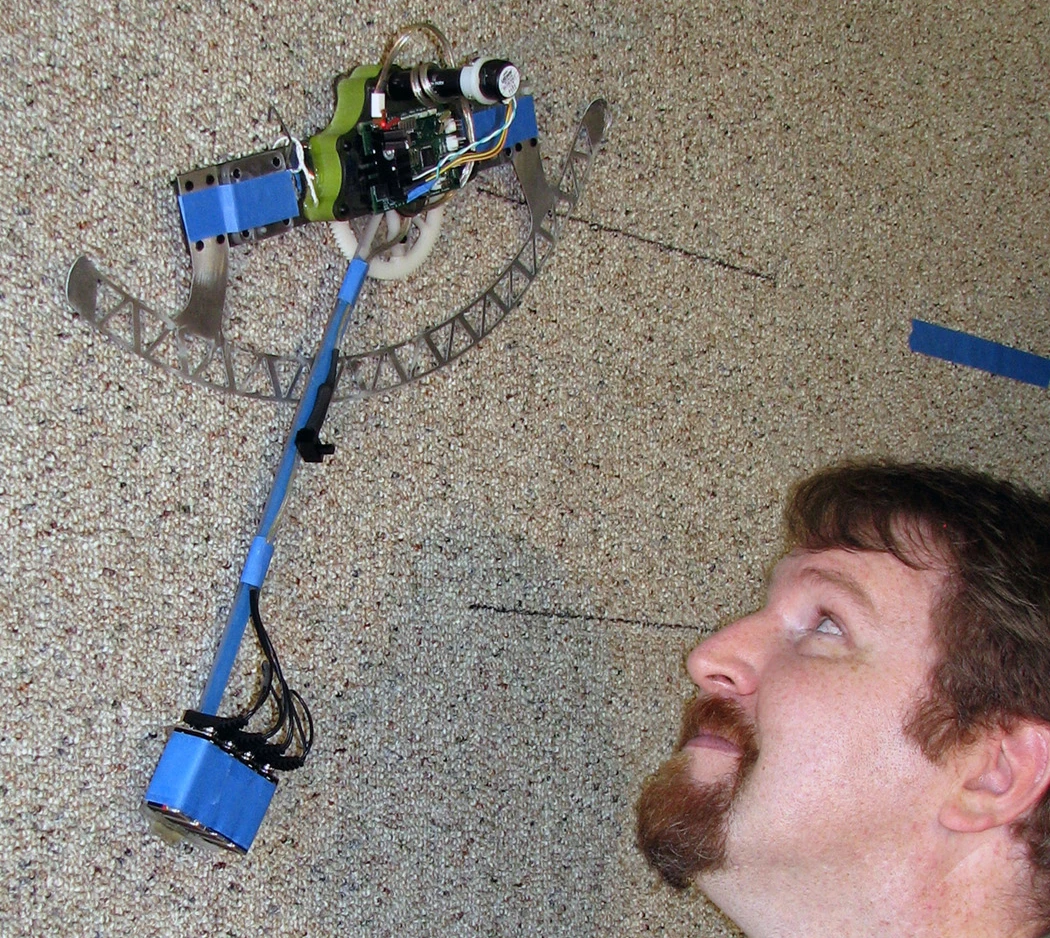
The ROCR Oscillating Climbing Robot was developed by William Provancher, an assistant professor of mechanical engineering at the University of Utah. It is small and lightweight – only 12.2-inches wide, 18-inches long from top to bottom and weighing only 1.2 pounds – and is designed to climb efficiently by moving like human rock climbers or apes swinging through trees. This mimicry allows ROCR to scramble up a carpeted eight-foot wall in just over 15 seconds.
Other wall-climbing robots can ascend faster than ROCR, which can climb at 6.2-inches per second. However, none have been able to achieve the 20 percent efficiency in climbing tests that ROCR has managed, “which is relatively impressive given that a car's engine is approximately 25 percent efficient," Provancher says. Provancher defines the robot's efficiency as the ratio of work performed in the act of climbing to the electrical energy consumed by the robot.
Building a more efficient robot
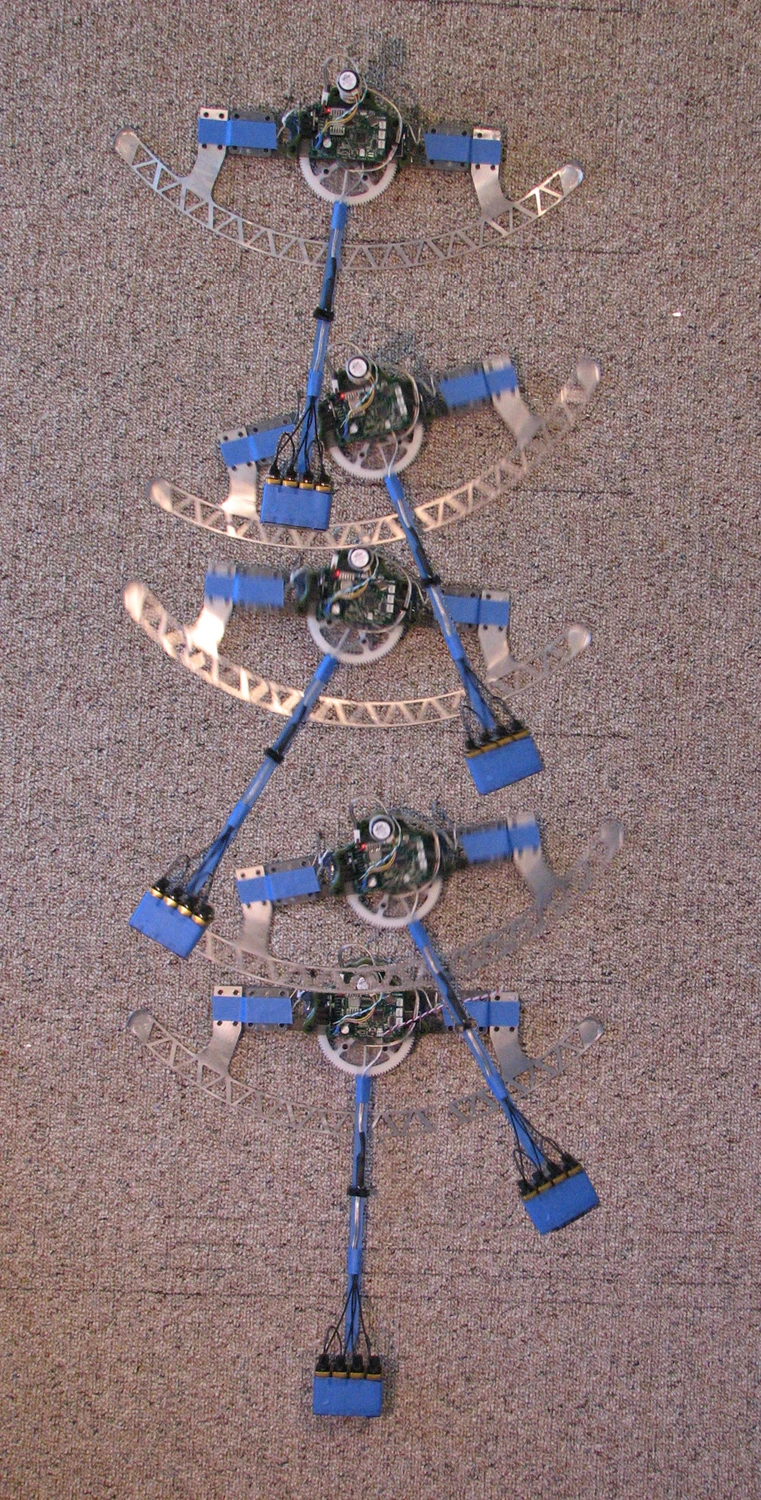
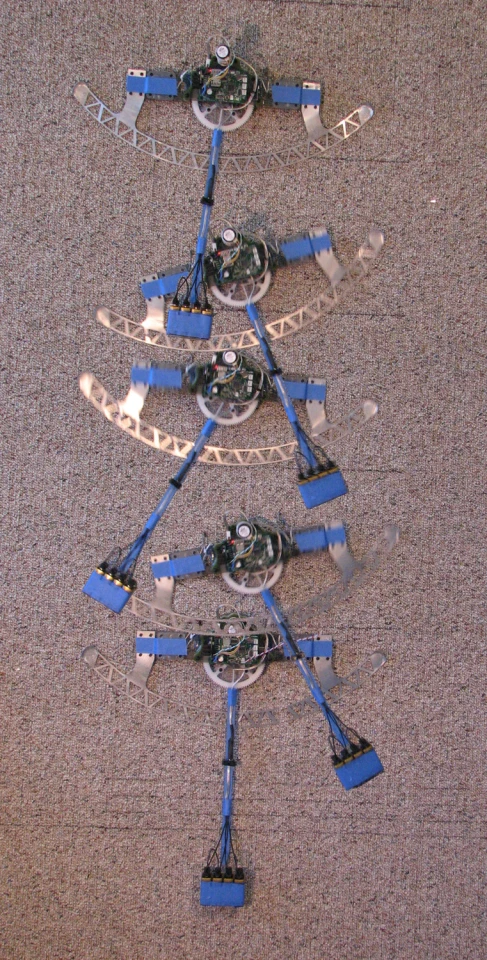
ROCR is self-contained and autonomous, with a microcomputer, sensors and power electronics to execute desired tail motions to make it climb. The motor that drives the robot's tail and a curved, girder-like stabilizer bar attach to the robot's upper body. The upper body also has two small, steel, hook-like claws to sink into a carpeted wall as the robot climbs. Without the stabilizer, ROCR's claws tended to move away from the wall as it climbed and it fell.The motor drives a gear at the top of the tail, causing the tail to swing back and forth, which propels the robot upward. A battery is at the end of the tail and provides the mass that is necessary to swing the robot upward. ROCR grips the wall with one hand at a time and swings its tail. This causes a shift in ROCR’s center of gravity that raises its free hand, which then grips the wall and the process repeats.
"It pursues this goal of efficiency with a design that mimics efficient systems both in nature and manmade," Provancher says. "It mimics a gibbon swinging through the trees and a grandfather clock's pendulum, both of which are extremely efficient."
Provancher and his team decided to focus on wall climbing efficiency because, now that various methods have been tried and proven for robots to climb a variety of wall surfaces, for such robots to have both versatility and mission life, “efficiency rises to the top of the list of things to focus on,” he says.
Maximizing efficiency
Before testing the robot itself, Provancher and colleagues used computer software to simulate ROCR's climbing, using such simulations to evaluate the most efficient climbing strategies and fine-tune the robot's physical features.Then they conducted experiments, varying how fast and how far the robot's tail swung, to determine how to get the robot to climb most efficiently up an 8-foot-tall piece of plywood covered with a short-nap carpet.
The robot operated fastest and most efficiently when it ran near resonance - near the robot's natural frequency - similar to the way a grandfather clock's pendulum swings at its natural frequency. With its tail swinging more slowly, it climbed but not as quickly or efficiently.
The researchers found it achieve the greatest efficiency – 20 percent – when the tail swung back and forth 120 degrees (or 60 degrees to each side of straight down), when the tail swung back and forth 1.125 times per seconds and when the claws were spaced 4.9 inches apart.
When the tail swung at two times per second, it was too fast and ROCR jumped off the wall – but like any seasoned climber it was attached to a safety cord and wasn’t damaged.
Provancher says the study is the first to set a benchmark for the efficiency of climbing robots against which future models may be compared. He says future work will include improving the robot's design, integrating more complex mechanisms for gripping to walls of various sorts, such as brick and sandstone, and investigating more complex ways of controlling the robot - all aimed at improving efficiency.
"Higher climbing efficiencies will extend the battery life of a self-contained, autonomous robot and expand the variety of tasks the robot can perform," he says. "While this robot eventually can be used for inspection, maintenance and surveillance, probably the greatest short-term potential is as a teaching tool or as a really cool toy."
Provancher’s study on the development of the ROCR Oscillating Climbing Robot is set for online publication this month by Transactions on Mechatronics, a journal of the Institute of Electrical and Electronics Engineers and American Society of Mechanical Engineers.





