





















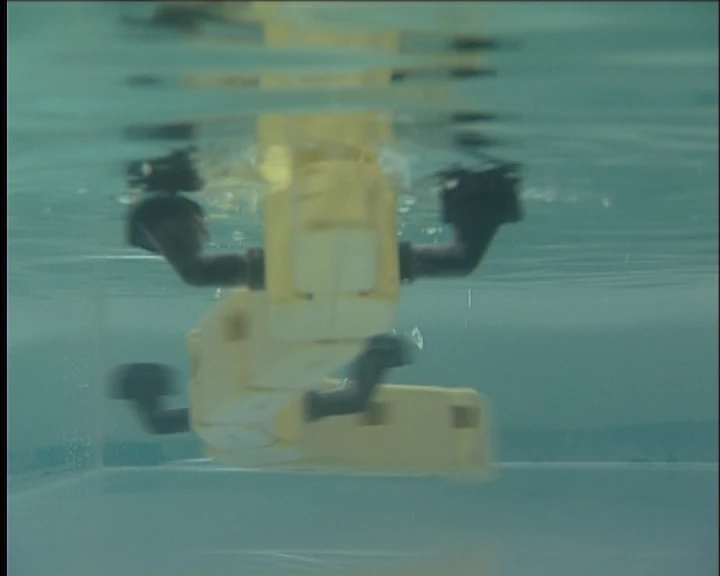
Scientists have often taken inspiration from the animal world in robotic designs, with bots modeled after fish, sandfish lizards, and even sea turtles. Such biomimicry makes sense – if you want a robot to move a certain way, why not look to creatures that already can? With the Salamandra robotica II, researchers have tried to replicate the movement of a salamander in designing a robot that can walk or crawl on land as easily as it swims in the water.
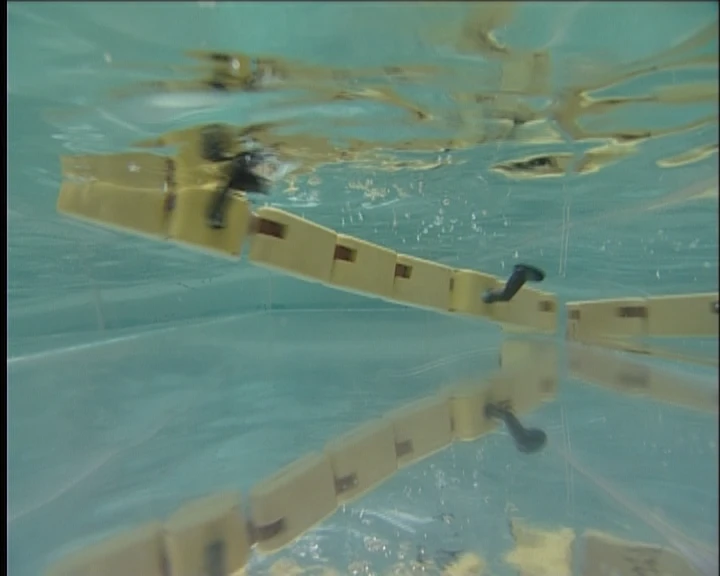
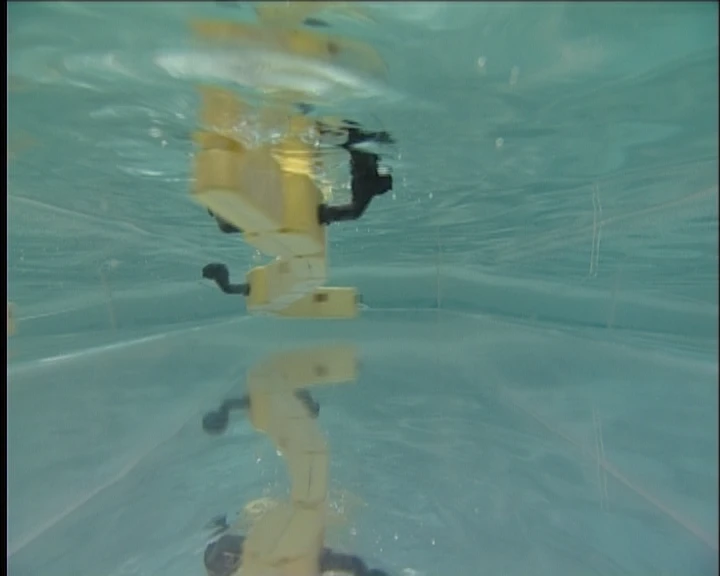
Salamanders are known for their ability to transition from walking on land with their legs to swimming in water by undulating their whole body like a fish. The design team at the Biorobotics Laboratory of École Polytechnique Fédérale de Lausanne (EPFL) in Switzerland created the amphibious Salamandra bot to better understand how one animal can change its movements so seamlessly.
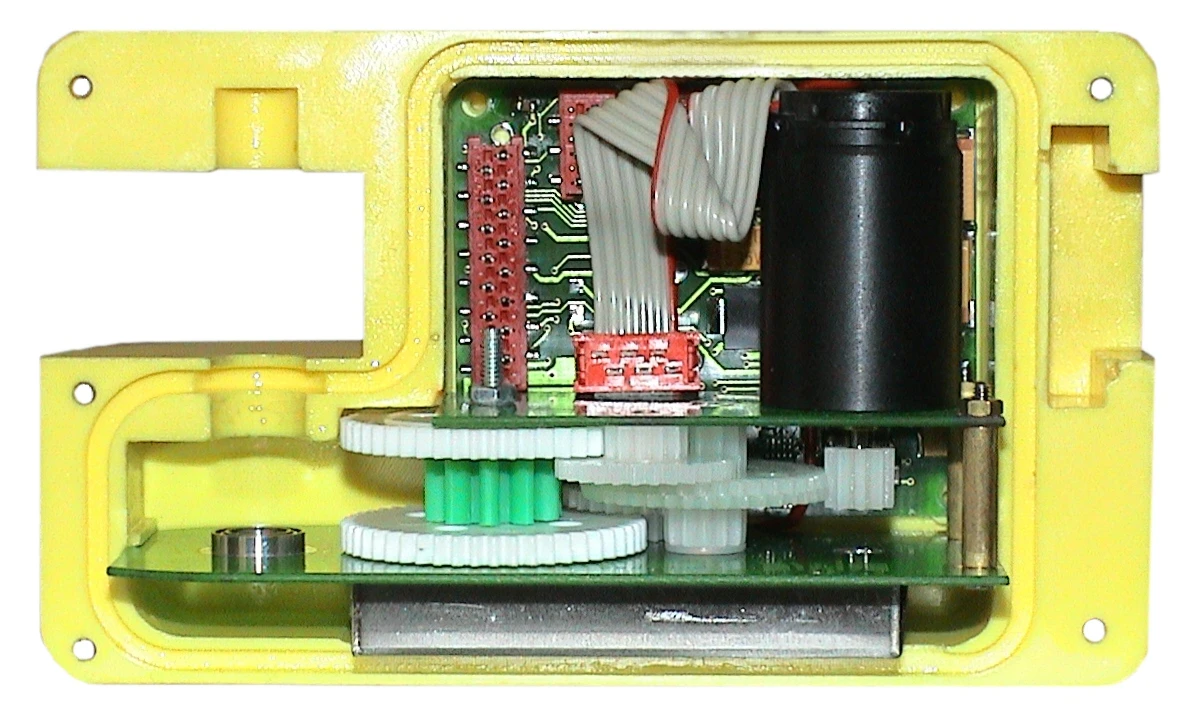
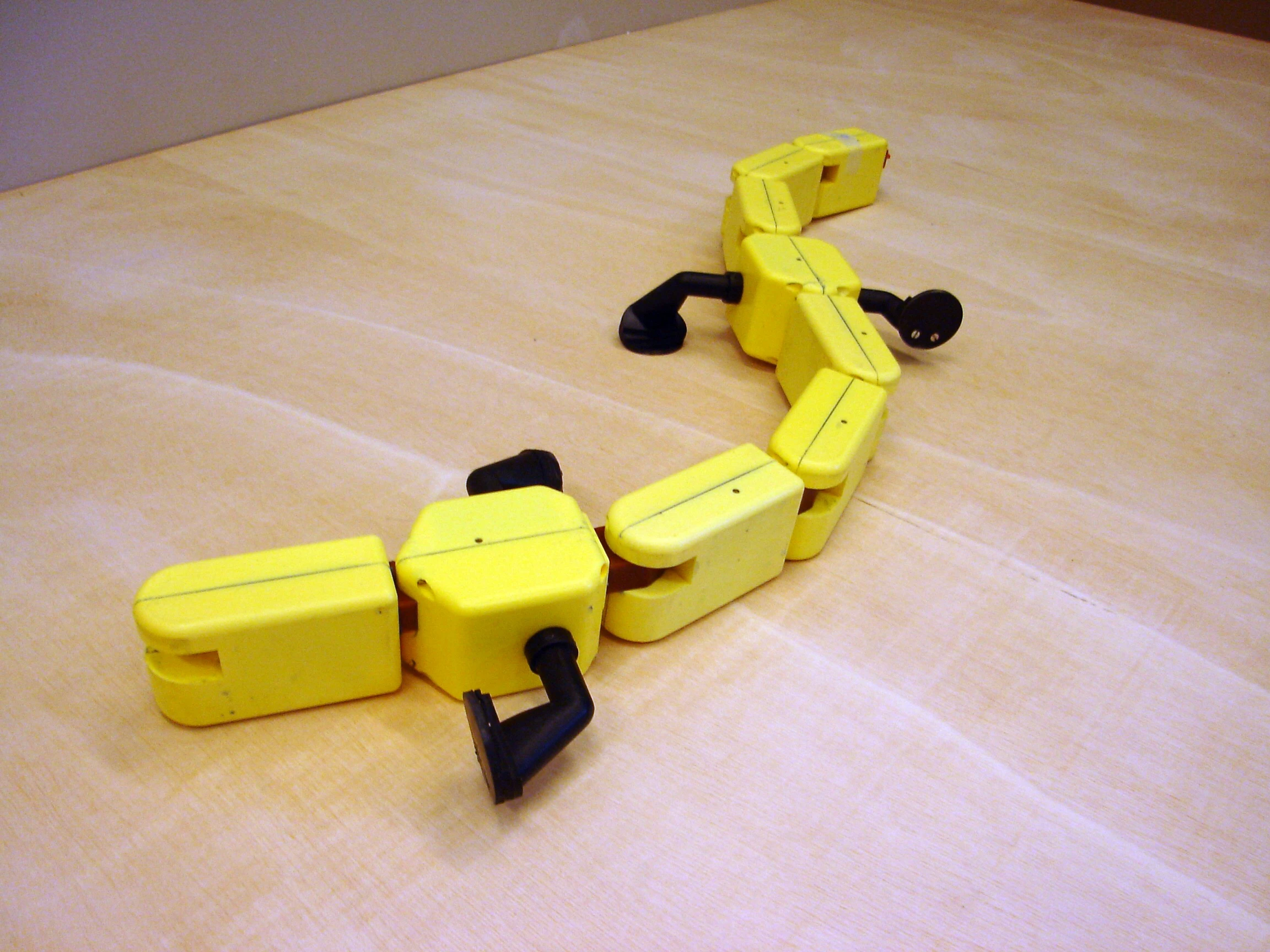
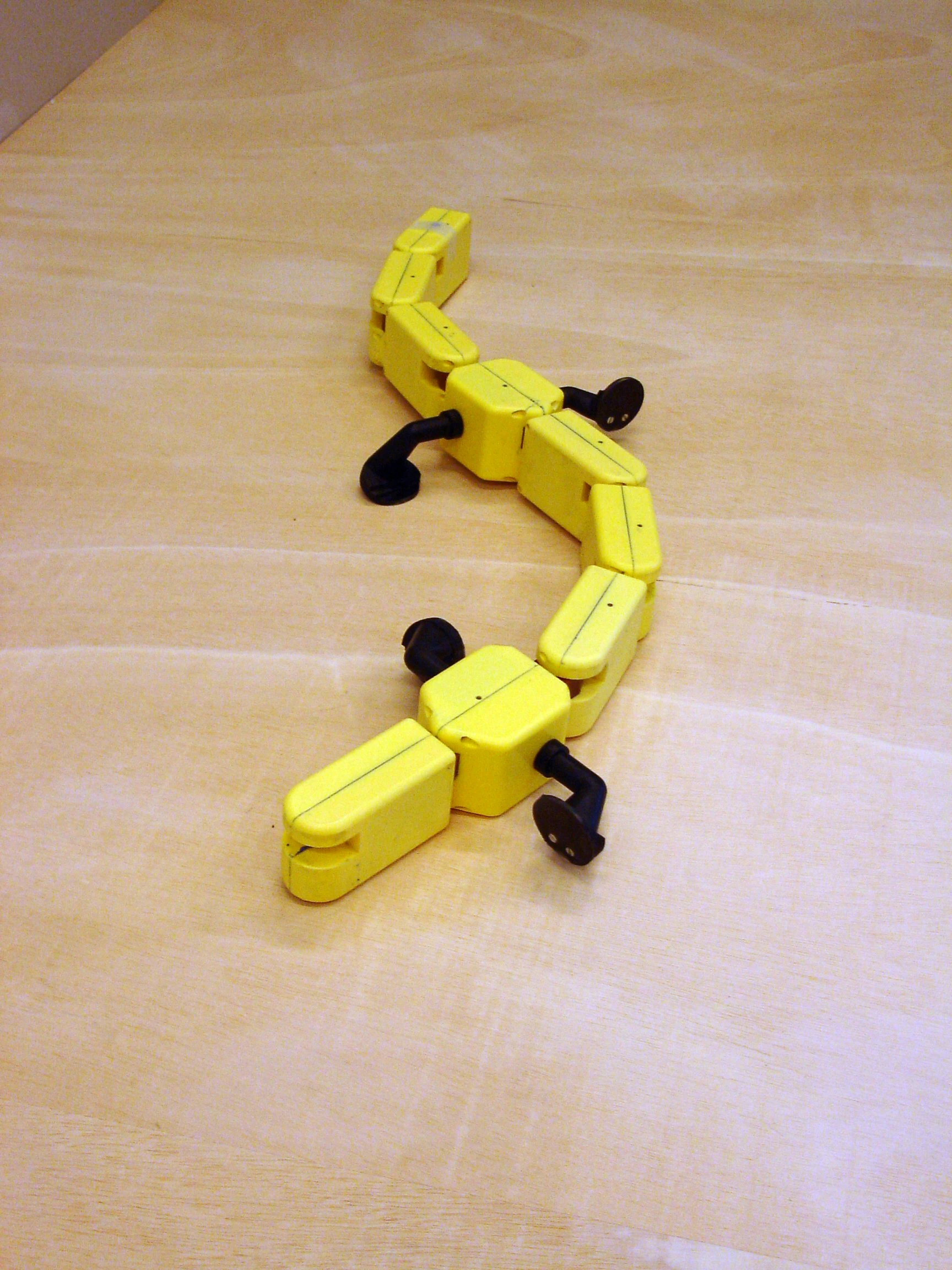
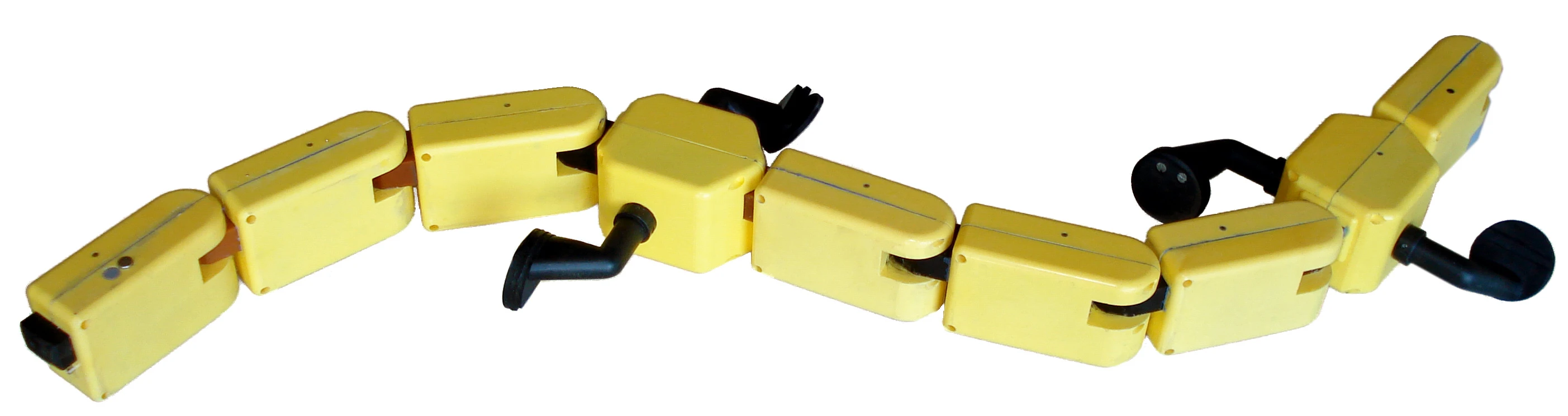
To do this, the group had to essentially build a mock-up of a salamander's vertebrae and limbs that could alter its stance depending on whether it was traversing in water or not. Walking is simply handled by rotating the limbs, but reproducing the wave-like swimming motions requires a system of coupled nonlinear oscillators. A human controller can then use a laptop to wirelessly issue commands to an on-board microcontroller to change its motion, speed, and direction. The result is the first robot that's equally capable of swimming like a fish, crawling like a snake, and walking like a lizard.

The Salamandra robotica II is actually the latest model of a prototype that was developed back in 2007. This newest version includes several improvements, such as a faster swimming speed, foldable limbs, and enhanced microcontrollers that better simulate neural pathways and muscle coordination. The researchers hope the upgraded motion will help in developing more amphibious robots that can travel over land and water equally, which could eventually become a valuable tool for search and rescue operations.
Salamandra robotica II is scheduled to be a guest of honor at Innorobo 2013, a robotics exhibition that runs from March 19 - 21 in Lyon, France. Check out the short video below to see how it swims from a lake and walks right onto the shore.
Source: EPFL





