


In what seems like a paradox, researchers at ETH Zürich have developed a robotic manipulator that can pick up and manipulate small objects without actually touching them. Using ultrasonic waves, the new manipulator created by ETH Pioneer Fellow Marcel Schuck could be used for handling tiny, fragile items, including precision watch parts.
The manipulators or hands of a robot have undergone great changes over the last few decades as crude pincers have given way to more complex, sensitive devices designed for a wide variety of applications, from flipping burgers to catching jellyfish. Unfortunately, even the most delicate of manipulators made of metal and plastic can be a bit on the rough side, and even the softest grippers developed to handle fragile objects carry the risk of contaminating the object being manipulated.
Ideally, the best manipulator is one that won't touch an object at all and Schuck came up with one that doesn't make contact with anything other than sound waves. The prototype for this device is a lab-bench robotic arm and the "hand" is actually a pair of 3D-printed semi-spheres that make it look like a high-tech ice cream scoop.
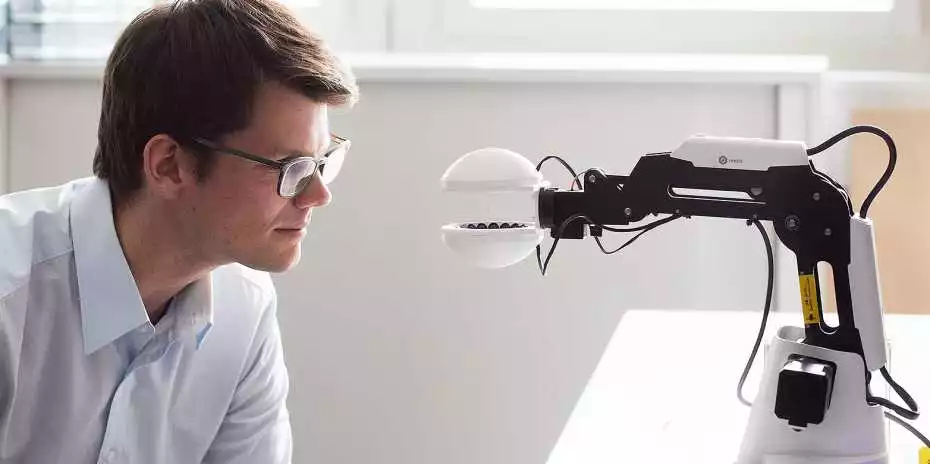
The principle behind the new manipulator is what is called "acoustic levitation," which has been known for eight decades and involves ultrasonic waves creating a pressure field that can't be seen or heard by humans but is strong enough to lift small objects. If a number of these pressure fields or points are used, they overlay one another, allowing the object to be manipulated as if by invisible fingers.
Schuck's manipulator has an array of very small speakers installed inside the two semi-spheres. With software written by ETH doctoral student Marc Röthlisberger, the pressure points can be controlled – it's hoped that eventually such control can be performed in real-time. In this way, an object can be suspended, moved, or otherwise manipulated without being touched and with great precision and at low cost.

Schuck's ultimate ambition is to find practical applications for no-touch robotics, especially in the microchip or the watchmaking industry. "Toothed gearwheels, for example, are first coated with lubricant, and then the thickness of this lubricant layer is measured," he says. "Even the faintest touch could damage the thin film of lubricant." Microchip production is another potential application for the technology.
A more immediate goal is to produce a development kit for potential clients and to establish a start-up business in early 2021.
Source: ETH Zurich



