



We've seen robots that can walk, trot, run, and even do backflips, but now a student team is working on a rover robot prototype that hops about like a springbok. Designed and built by students from ETH Zurich and ZHAW Zurich, the SpaceBok being tested at ESA's ESTEC technical center in the Netherlands is designed to travel in lunar gravity by controlled bounds into space where all four legs leave the ground.
When the Apollo 11 mission landed on the Moon, one of the tasks given to Neil Armstrong and Buzz Aldrin was to practice how to move about on the Moon under one-sixth of Earth gravity. Though both astronauts had already trained under simulated lunar gravity, there was no substitute for the real thing, so as part of the two and a half hours of the first-ever Moonwalk, the two men spent a surprising amount of time gamboling about the Sea of Tranquility like a couple of toddlers.
The astronauts found that conventional walking in a pressure suit wasn't very practical in lunar gravity where one could jump 3 ft (1 m) high with ease. Instead, they learned that they could get around very well by adopting a loping gait or hopping with both feet together like a kangaroo.
According to the Swiss team, the SpaceBok could jump up to 2 m (6.6 ft) vertically on the Moon, which means it could move with surprising speed – a bit like a galloping horse, or a springbok in a hurry. However, when a quadruped runner takes on a gait where all four legs break contact with the ground, stability becomes a real issue as it is now, essentially, a tiny spacecraft on a tiny ballistic trajectory. It is now in the realm of dynamic walking. That's essentially when walking becomes controlled falling down.
"Instead of static walking, where at least three legs stay on the ground at all times, dynamic walking allows for gaits with full flight phases during which all legs stay off the ground," says project leader Hendrik Kolvenbach. "Animals make use of dynamic gaits due to their efficiency, but until recently, the computational power and algorithms required for control made it challenging to realize them on robots. For the lower gravity environments of the Moon, Mars or asteroids, jumping off the ground like this turns out to be a very efficient way to get around."
Like its terrestrial African counterpart, SpaceBok uses legs with incorporated springs that act as energy storage units to absorb the impact of each landing, then reuses the force for the next jump. In addition, it's equipped with something a springbok doesn't have – a reaction wheel that allows itself to orient itself the same way a satellite does.
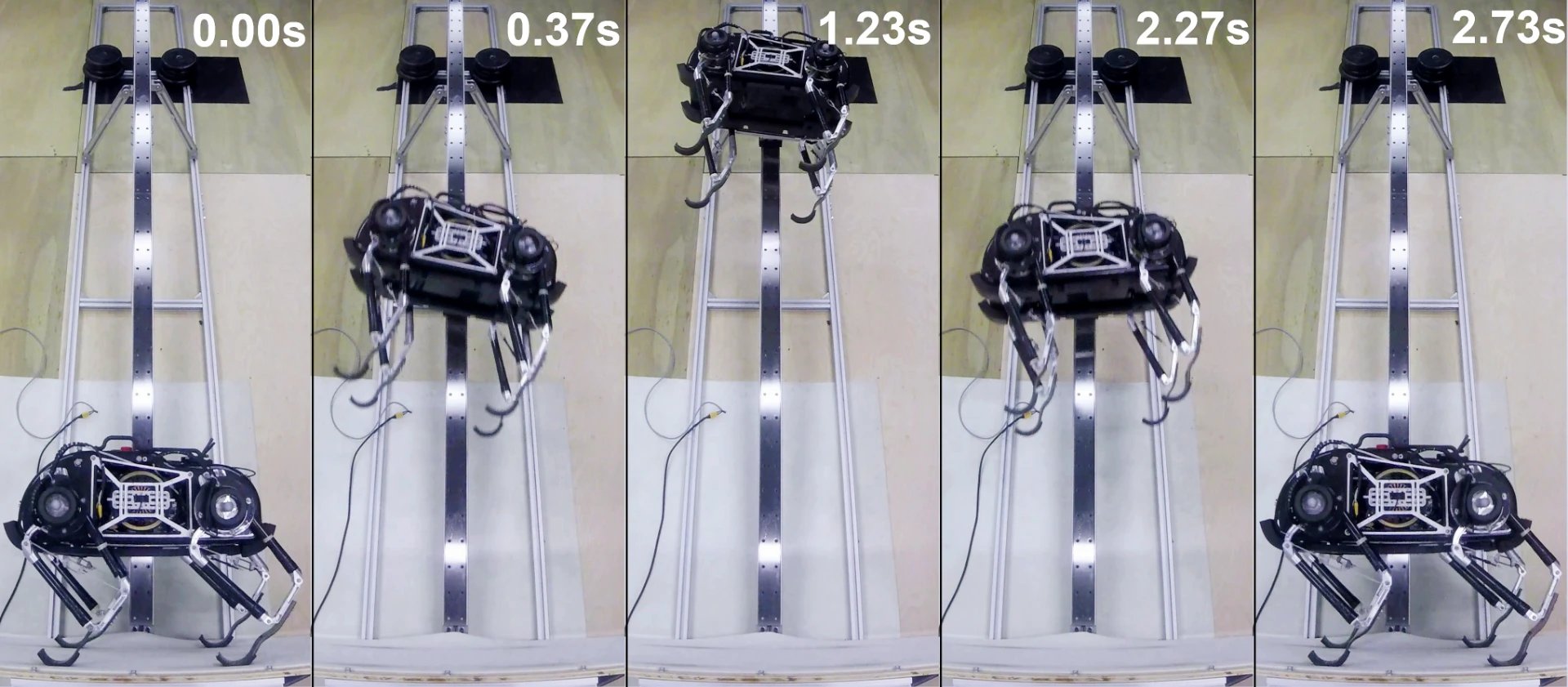
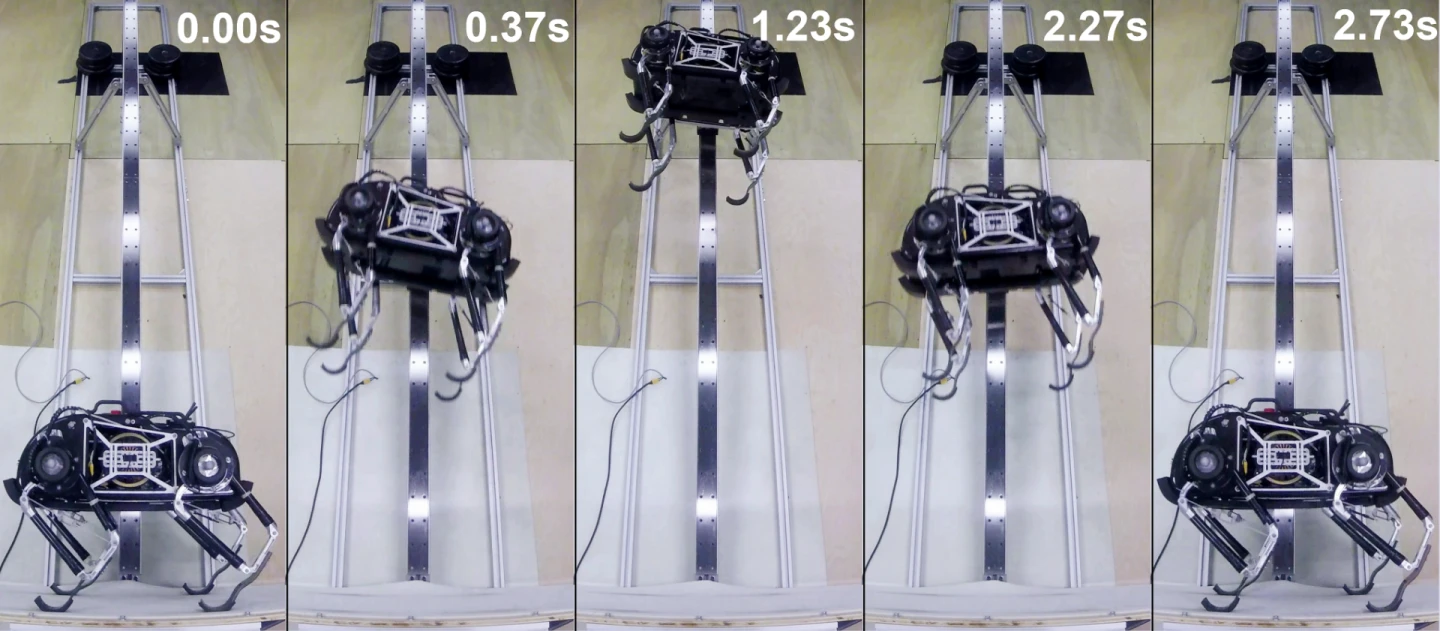
So far, the team has managed to get the SpaceBok to make repetitive jumps to heights of up to 4.3 ft (1.3 m) under simulated lunar gravity. They've also set up test facilities that mimic the extremely low gravity of asteroids, where the robot would spend much more time in flight.
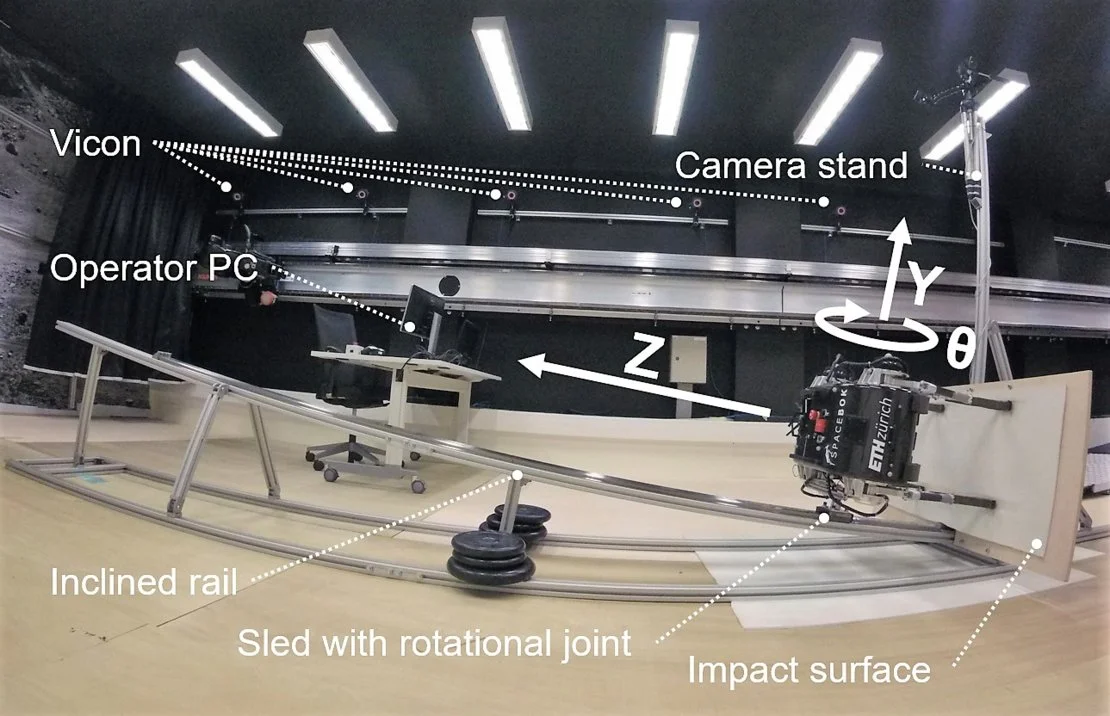
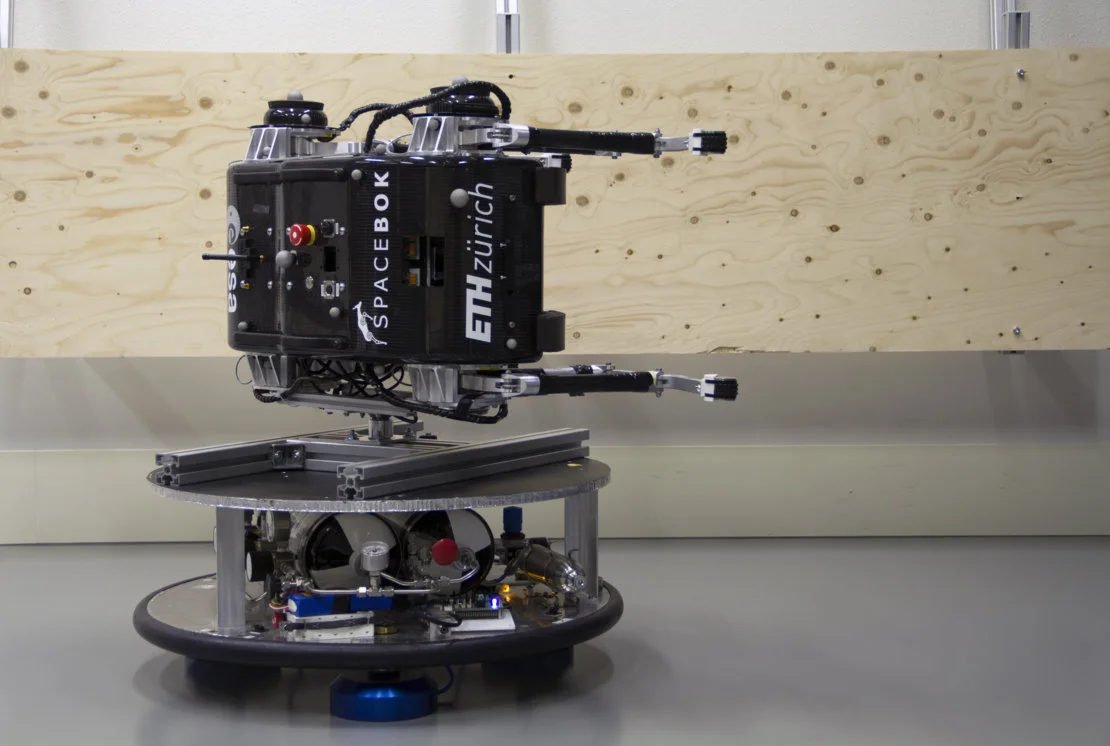
To do this, they used ESA's Orbital Robotics Bench for Integrated Technology (ORBIT) at the agency's Orbital Robotics and Guidance Navigation and Control Laboratory. Described as the flattest floor in the Netherlands, it's an epoxy surface measuring 15.7 by 29.5 ft (4.8 by 9 m) and bordered by flat walls. The team took SpaceBok and mounted it on its side on a free-floating platform, so it could jump from wall to wall, which acted as the floors. As it floated across, it used its reaction wheel to pivot so it always landed feet "up."
"The testing went sufficiently well that we even used SpaceBok to play a live-action game of Pong, the video game classic," says, Kolvenbach.
Later tests will place SpaceBok in environments that will include obstacles, hilly terrain, and realistic soil, which will then be followed by outdoor testing.
The video below shows SpaceBok hopping about.
Source: ESA






