






When it comes to exploring the murky depths of the oceans, autonomous underwater vehicles (AUVs) have become increasingly important over the past decade. These vehicles generally fall into one of two groups: propeller-driven vehicles such as Snookie that can travel fast and carry lots of instruments, but are limited to expeditions of just a few days, and “gliders,” which can stay at sea for weeks or even months at a time, but are slow. Engineers have combined the best of these two approaches to create a new long-range AUV (LRAUV) that can travel rapidly for hundreds of kilometers, “hover” in the water for weeks at a time, and carry a wide variety of instruments.
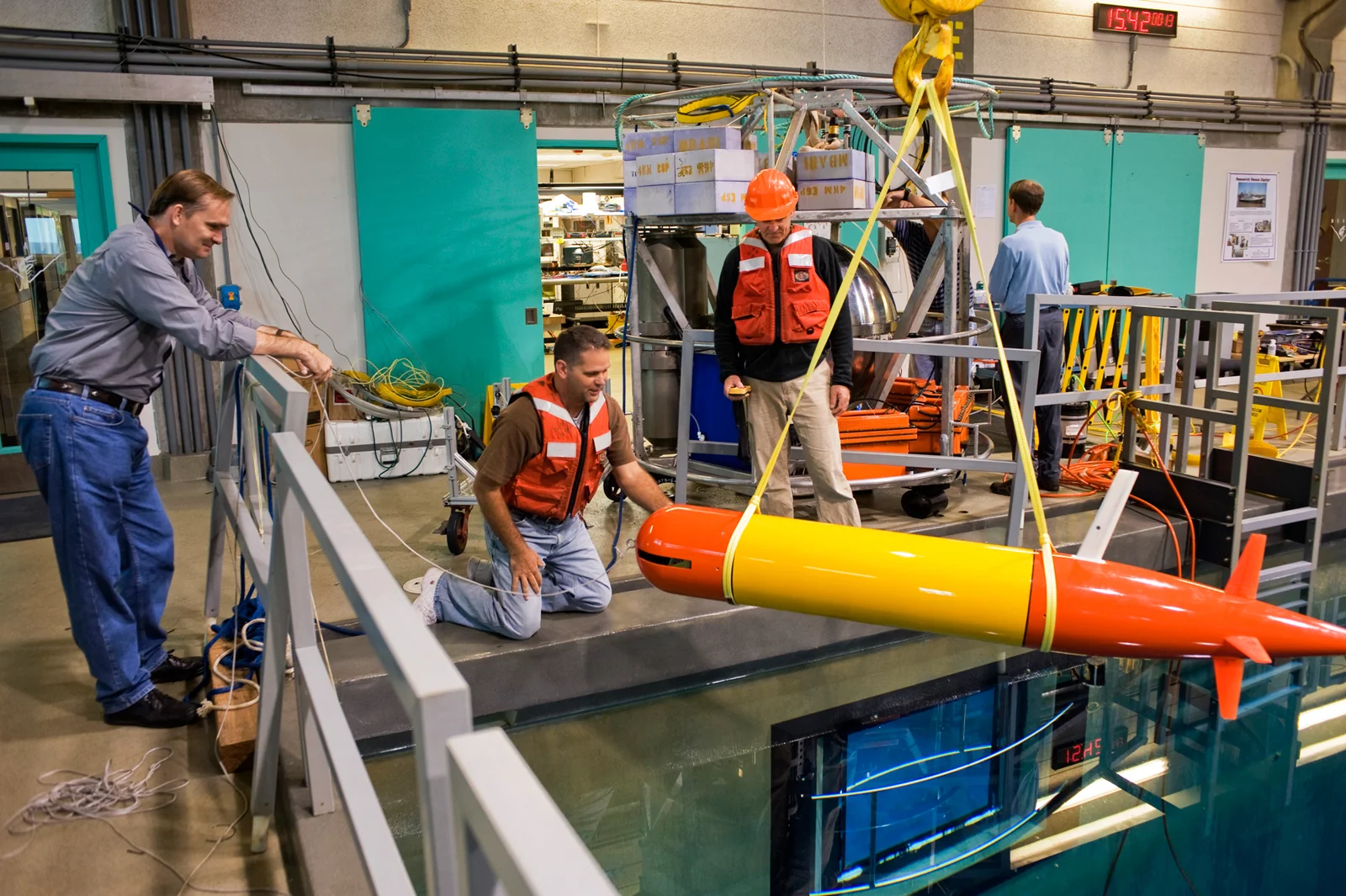
The engineers from the Monterey Bay Aquarium Research Institute (MBARI), which earlier this year used an AUV to study the Deepwater Horizon oil spill, spent four years designing, building and testing the new LRAUV dubbed Tethys – the name of an aquatic sea goddess from Greek mythology. The new robot spent most of October crisscrossing Monterey Bay as part of MBARI’s CANON experiment whose primary goal is to develop methods of tracking ocean features as they move through the ocean, and for studying how microscopic plankton in the water change over time.
During the October experiment, oceanographers used Tethys to track patches of microscopic algae that were carried around the bay by currents. The robot showed that it could travel fast enough to buck the currents, but could also go into “hover mode” to drift with the currents when needed. In “high-speed mode” the LRAUV can travel up to one meter per second (2.25 mph), which is about four times faster than most underwater gliders. However, it can also travel long distances at around half this speed.
Designed for efficiency
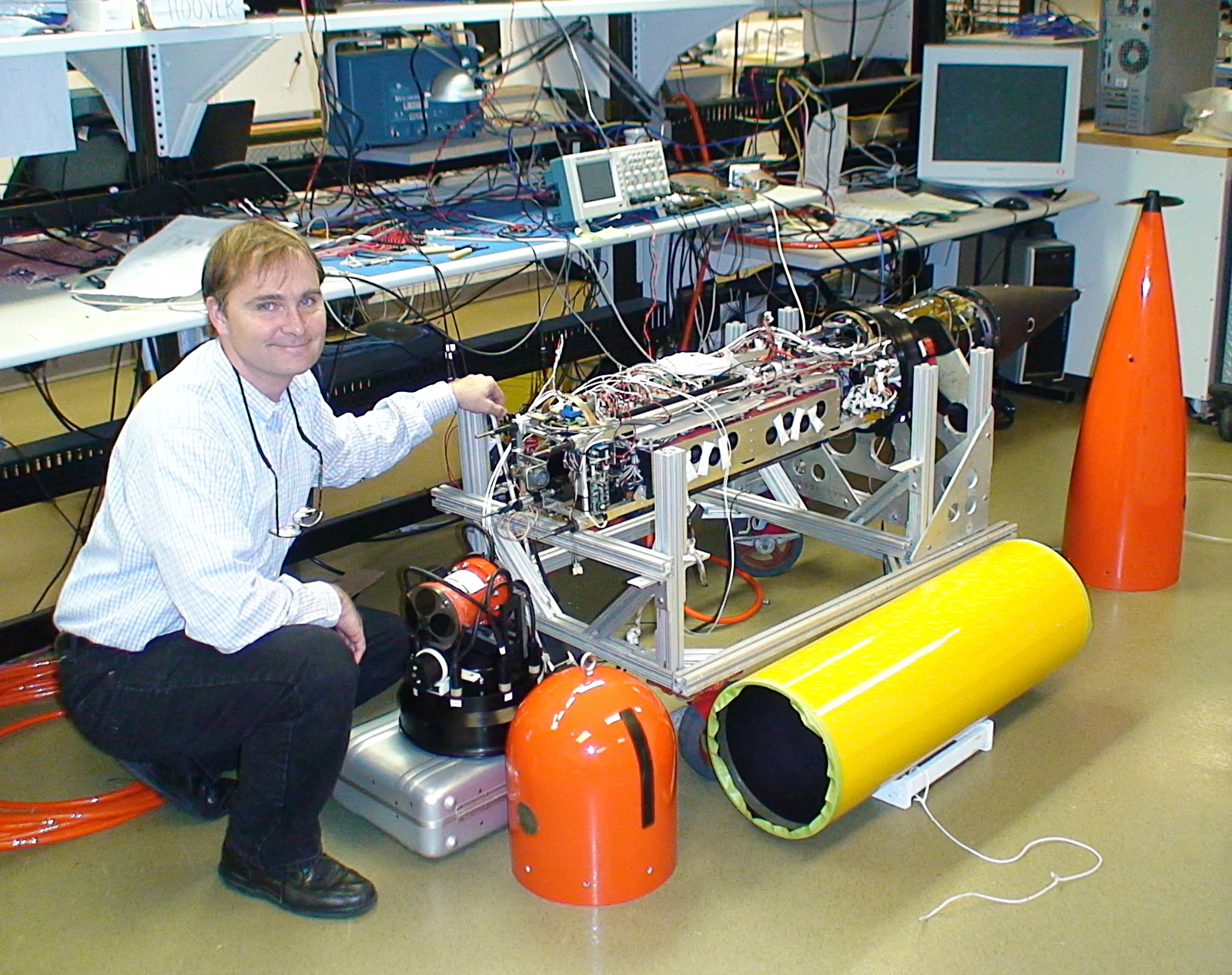
To maximize energy efficiency, Tethys’ hull, motor and propeller were computer designed and tested to minimize drag and maximize efficiency of propulsion. Like a fish, it can control its buoyancy and the angle at which it “swims” through the water. Like many laptops, the robot also incorporates sophisticated power-saving software that monitors what systems are being used and turns those systems off when they’re not in use.Since most robotic vehicles are slightly buoyant, they will float to the surface if the robot’s system’s fail. However, the variable buoyancy systems employed in Tethys means it can make itself neutrally buoyant. If it were to go dead in that state it would remain drifting somewhere below the surface making it potentially difficult to recover. To mitigate the risk of this happening the MBARI engineers designed numerous fail-safe systems into the robot, including some with their own independent power supplies.
Putting the A in AUV
Most AUVs are programmed on the surface of the water to follow a pre-set path, and some can be reprogrammed via satellite link when they come to the surface. Tethys takes autonomy one step further with its ability to make some decisions without human intervention. The engineers say such internal decision making becomes increasingly important when robots operate for weeks or months at a time. "We found that controlling the vehicle from shore via satellite was just too cumbersome. By the time the vehicle had seen a promising patch [of algal blooms], reported it to us, and we had sent the vehicle back toward the center of the patch, the patch had moved. Also, controlling the robot 24/7 was very tiring for the human operators. We suspected, and now we know, that the long-term success of such research depends on the vehicle being able to carry all this out on its own," said MBARI's Chief Technologist, Jim Bellingham.
Bellingham hopes that this new AUV design will be small and inexpensive enough so that it can be used for a variety of ocean research and monitoring. "We did some research and found that the most used research vehicles were the smallest ones. But it's a real challenge to balance the factors of complexity, weight, and cost. Ultimately we'd like to Tethys to be a vehicle that is broadly accessible to scientists – a vehicle that can be launched from a small boat, at relatively low cost."
Two AUVs better than one
The MBARI engineers are already busy building a second LRAUV because Bellingham says the vehicles are designed to run as part of a pack. When tracking patches of algae, for example, one LRAUV could be “parked” in the middle of the patch to drift with the currents, while a second LRAUV could circle around the outside to measure how the shape and size of the patch changed over time.Using two LRAUVs would also allow the two vehicles to be fitted with different instruments in a single experiment so they can monitor different types of marine organisms simultaneously.
"Although our first vehicle is equipped to study phytoplankton blooms, we want to equip subsequent vehicles to characterize other organisms, such as zooplankton [drifting marine animals]. We are working on the bottom of the food web now, but eventually we hope to observe interactions between organisms at different trophic levels. For example, we could study zooplankton grazing on phytoplankton, or fish and marine mammals feeding on krill. Of course, this is going to be a long-term effort,” said Bellingham.
The MBARI engineers say Tethys has already performed better than expected. In testing using relatively low-power rechargeable batteries, the AUV completed a four-day science run with plenty of battery power to spare. Using high-power disposable batteries the researchers hope that their LRAUV will eventually be able to travel from California to Hawaii.





