



While creating robotic grippers to pick up objects that are all the same shape and consistency is relatively easy, difficulties arise when trying to create one versatile enough to handle a wider variety of objects. The flexibility of the human hand has led many robotics researchers to borrow the familiar four finger and opposable thumb template that has served us so well, but getting the robotic hand to exert enough force to grip a variety of objects without breaking the more fragile ones is still a difficult task. For this reason a team of researchers has bypassed the traditional human hand and fingers design to create a versatile gripper using everyday coffee grounds and a latex party balloon.
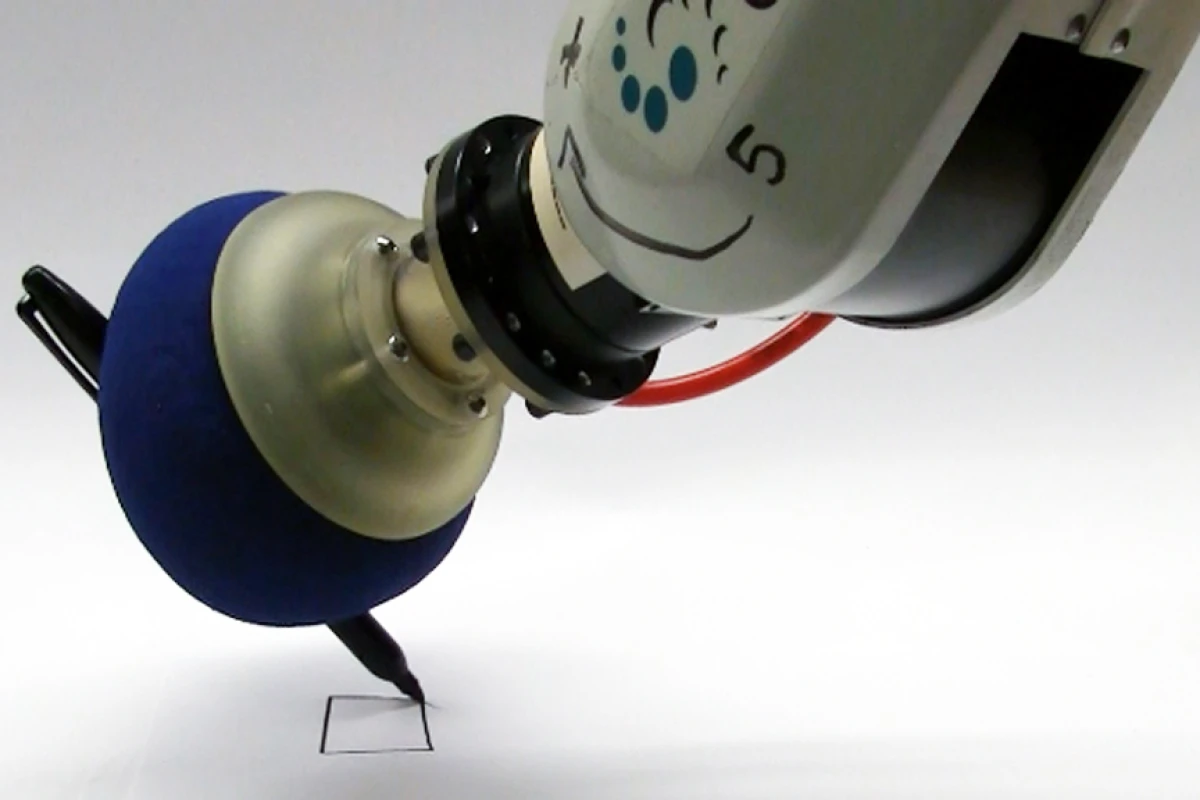
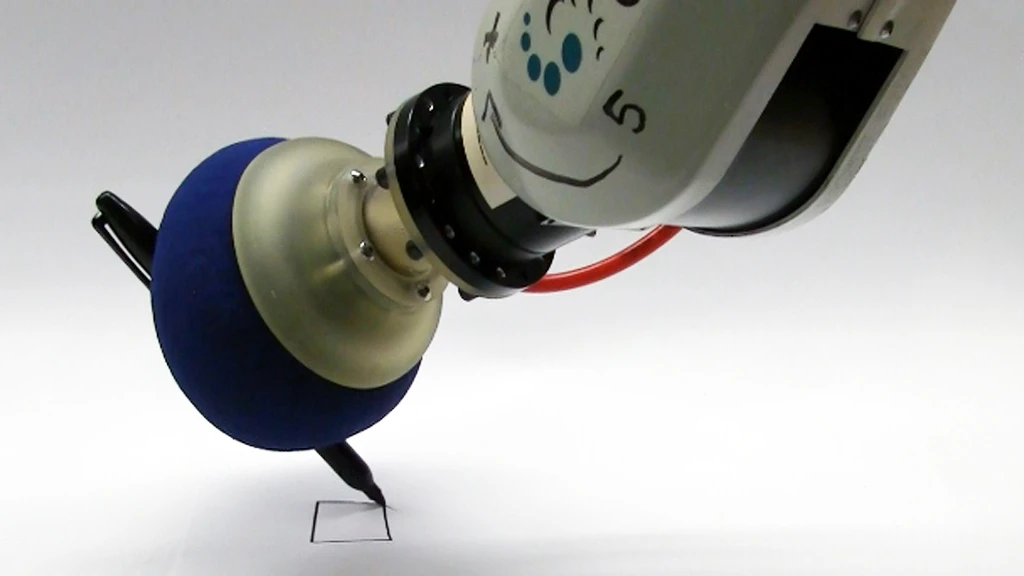
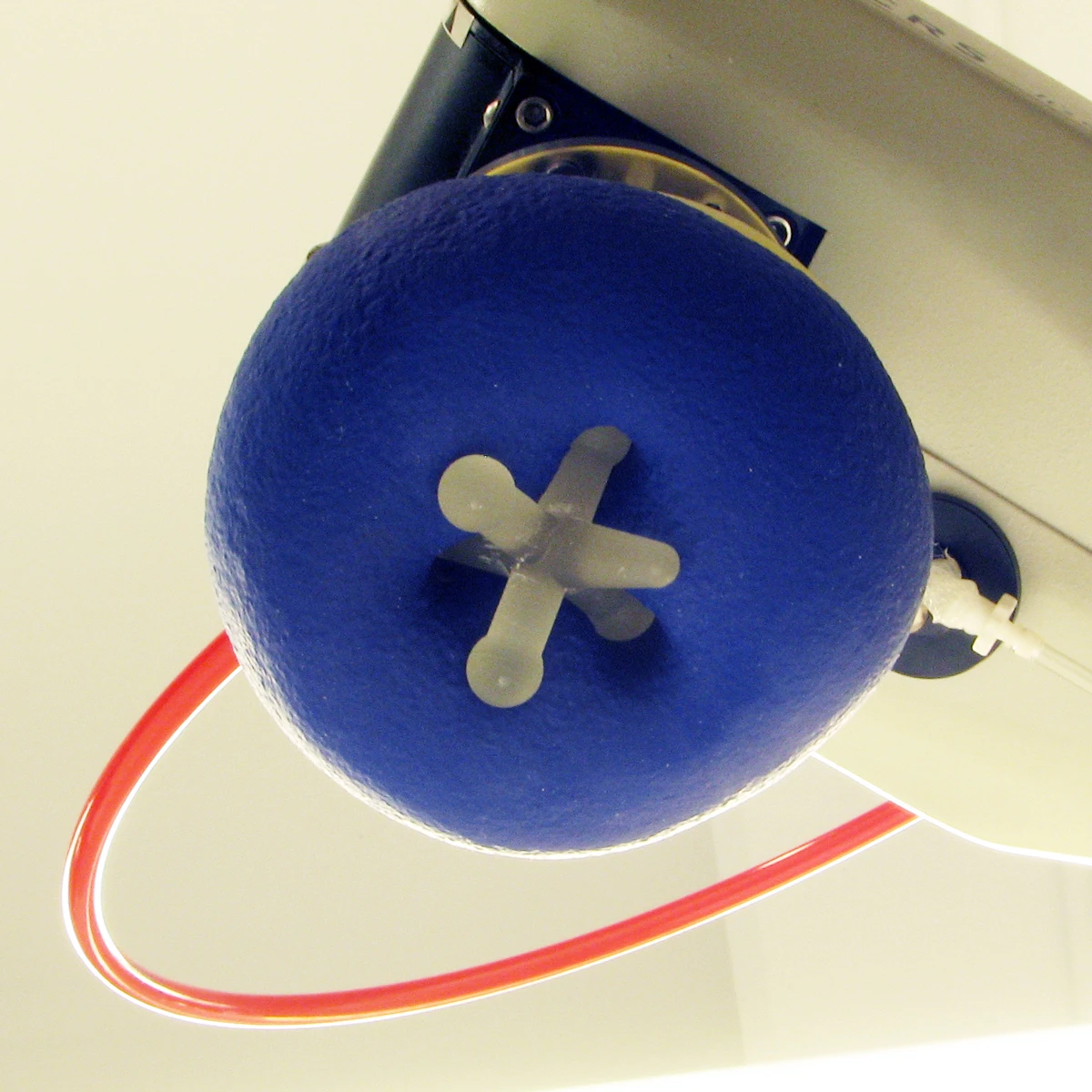
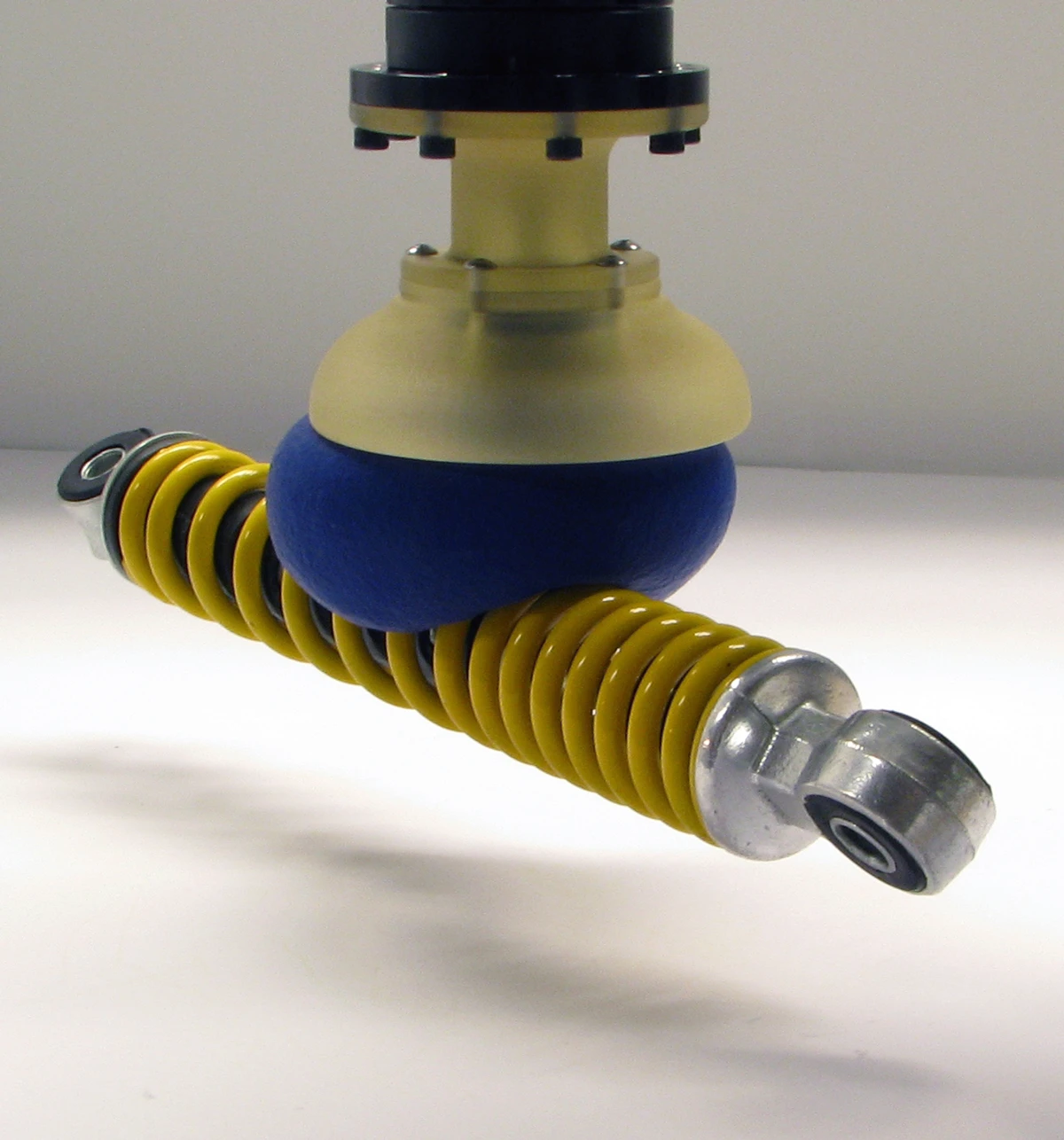
Called the universal gripper, instead of being designed to pick up a particular object the device conforms to the object it is grabbing. The gripper, which is attached to a robotic arm, consists of an everyday party balloon filled with ground coffee. The coffee-filled balloon presses down and deforms around the object to be picked up, and then a vacuum sucks the air out of the balloon to solidify the grip on the object. When the vacuum is released, the balloon becomes soft again and the gripper lets go of the object.

The gripper is able to form a solid grip because the coffee is a particulate material made up of large aggregates of individually solid particles. Particulate materials have a so-called jamming transition, which turns their behavior from fluid-like to solid-like when the particles can no longer slide past each other. This phenomenon would be recognizable to coffee drinkers familiar with vacuum-packed coffee, which is hard as a brick until the package is unsealed.
As Cornell researcher Hod Lipson explains, “the ground coffee grains are like lots of small gears. When they are not pressed together they can roll over each other and flow. When they are pressed together just a little bit, the teeth interlock, and they become solid."
In principle, any particulate material that can jam will do and early prototypes involved rice, couscous and ground-up tires. Coffee was chosen because it is light and also jams well. Although sand was found to jam better than coffee, it was prohibitively heavy.
The researchers say that the jamming-based gripper’s good performance with almost any object, including a raw egg or a coin – both of which are notoriously difficult for traditional robotic grippers – are what sets the device apart from other grippers. They say this versatility will make it useful in situations where a robot needs to grip or pick up a wide variety of items, including items it may never have encountered before.
The research that led to the creation of the gripper was a collaboration between the University of Chicago, Cornell University, and iRobot Corporation. In the short term the team plans to further develop the gripper with a long term view of applying jamming in a more general way to adaptive robots and structures that might reconfigure, locomote, or recover from damage.
The team's research appears online in online in Proceedings of the National Academy of Sciences.





