








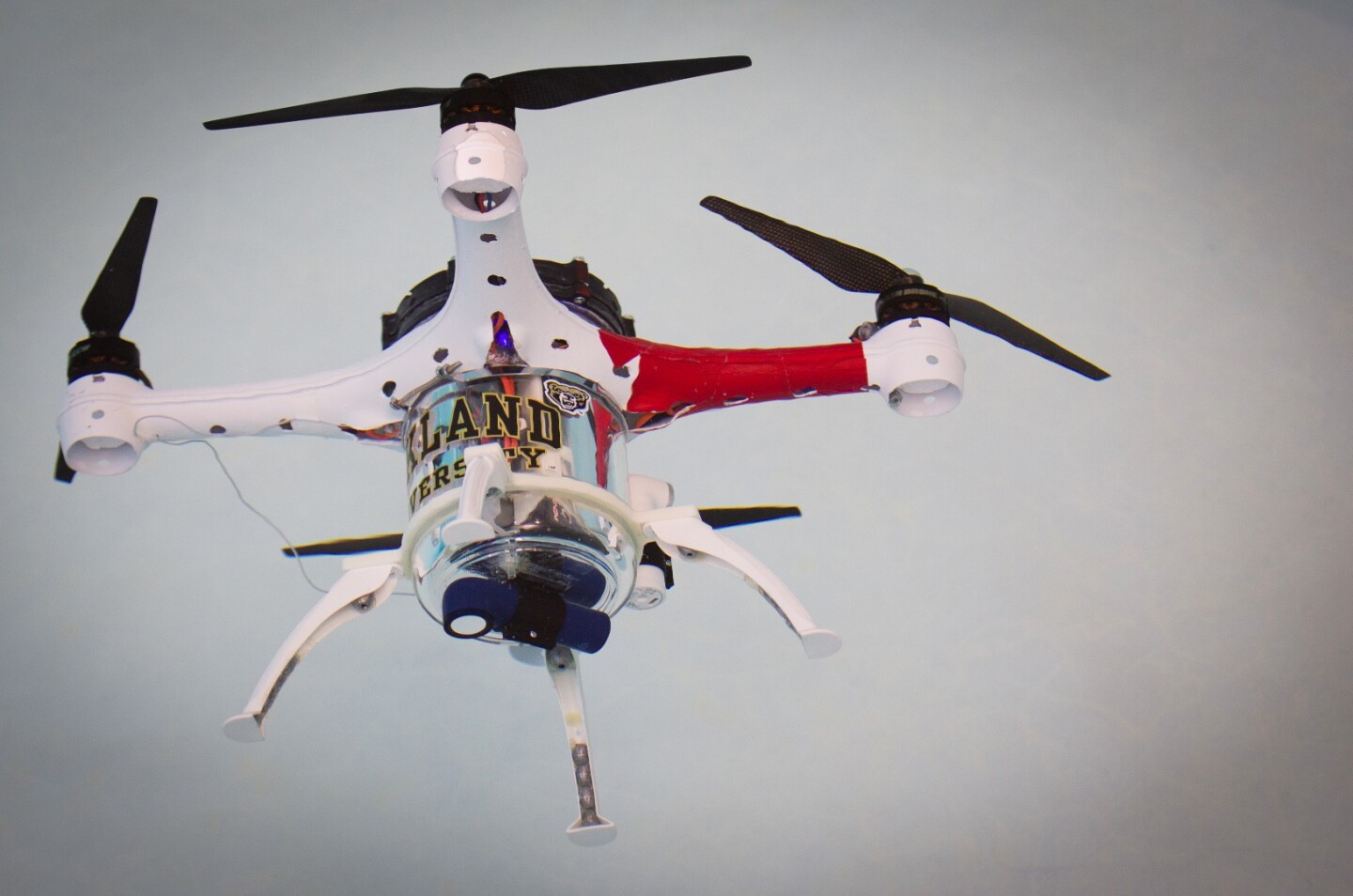
Along with the usual flying drones, there are also models that can move along the surface of the water like boats, that can explore underwater like submarines, or that can even both fly and float. As is the case with its feathered namesake, however, Oakland University's Loon Copter can fly, land on the water to see what's under the surface, and then dive down to check out what it sees.
The Loon flies in the same fashion as any other quadcopter, and initially floats when it comes to rest on the water. It can then simply sit in one spot, or it can use its props to push itself along the surface. The real fun starts when it pumps water into its buoyancy chamber, though, causing it to sink.
Instead of submerging straight down, the Loon actually tips to one side as it sinks. It then re-engages its props, allowing them to pull it top-first through the water. While it's underwater, it can turn to either side, dive or ascend using its water ballast system, and record video or gather other data as it does so.
Once it's time to get airborne again, it just pumps out its buoyancy chamber, causing it to float back to the surface and swing into position.

In its current prototype form, the untethered drone's underwater remote control range is limited to a depth of a few meters. Its video also can't be transmitted topside, and is instead recorded onboard for subsequent viewing. Down the road, however, all that could change.
"We are looking into acoustic modems, repeater buoys, and some other techniques that could allow streaming of live video for operator feedback as well as data and control commands," lead scientist Dr. Osamah Rawashdeh tells us. "For open-water applications, we can have the vehicle dive at predefined GPS points to various depths autonomously and follow some pre-programmed movement patters underwater to collect data or video footage."
It's all very intriguing, but what might the drone actually be used for? According to Rawashdeh (who previously helped bring us the Autobike), possible applications include search-and-rescue operations, bridge foundation inspections, underwater pipeline inspections, tracking of oil spills at different depths, and marine life studies. It has even been suggested that the Loon could spot sharks from the air, then land in the water and use a deterrent system to chase them away from nearby swimmers.
Given the way that this sort of technology progresses, perhaps it shouldn't come as a surprise that the Loon isn't the only flying/diving drone out there – both Georgia Tech and Rutgers University have recently announced versions of their own. While Georgia Tech's GTQ-Cormorant simply sinks and rises straight up and down like a diving bell, Rutgers' Naviator is considerably closer to the Loon in functionality. That said, Rawashdeh notes that it uses its props instead of a ballast system to dive and surface, plus it doesn't float.
"The Loon Copter can loiter on the surface of the water without energy usage," he says. "It can also change and control depth with little power (no propeller use). Not having to use propellers to change depth or resurface also has an advantage when obstacles (e.g: structures or vegetation) are close to the drone. We can resurface without hitting any obstacles."
Rawashdeh and his team will be in Dubai next month, where the Loon will be one of 10 finalists in the Drones for Good competition. The drone can be seen flying, floating and diving in the following video.
Sources: Oakland University, Drones for Good


