

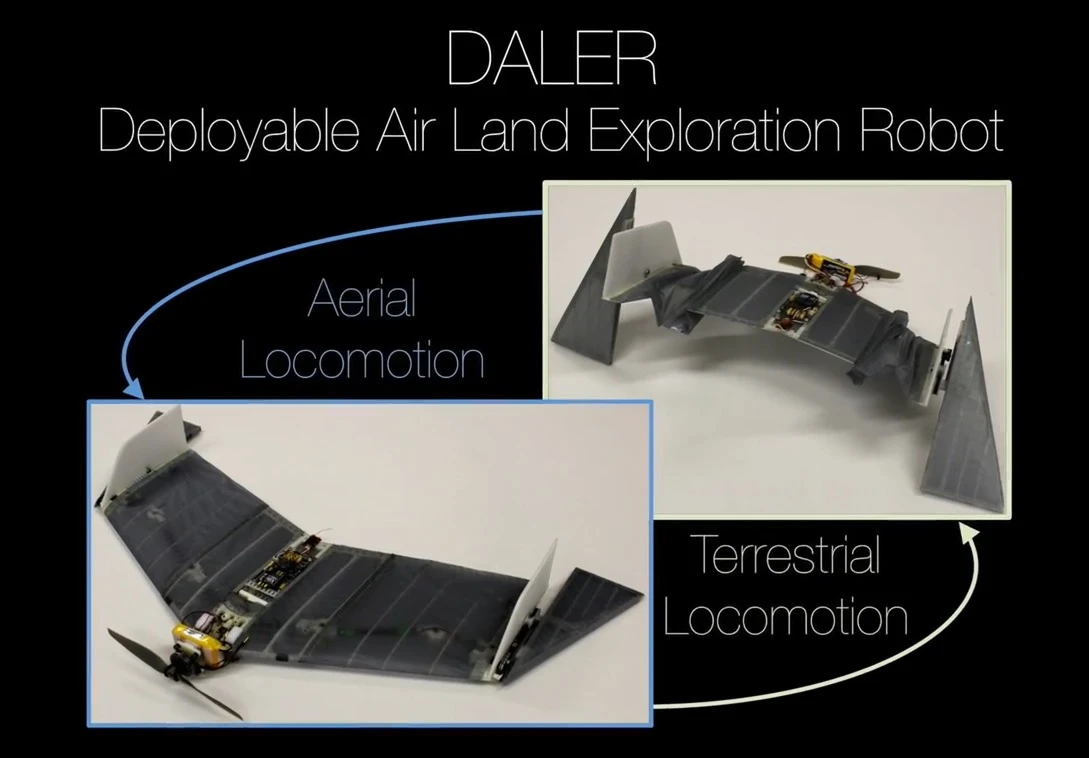




Robot drones that can both fly and move about on land would vastly improve their usefulness by increasing the areas in which they could operate. Adding wheels of sufficient size to handle most terrains, however, would adversely increase both the weight and size of such a drone. Researchers at the Swiss Federal Institute of Technology in Lausanne (EPFL), building on their earlier developments, have created a drone that uses wings incorporating movable tips, allowing it to both walk and fly.
The DALER (Deployable Air-Land Exploration Robot) drone was actually inspired by the vampire bat that uses the tips of its wings like legs when moving around on the ground. Similarly, the DALER has wings that can be used as both wings and legs (whegs).
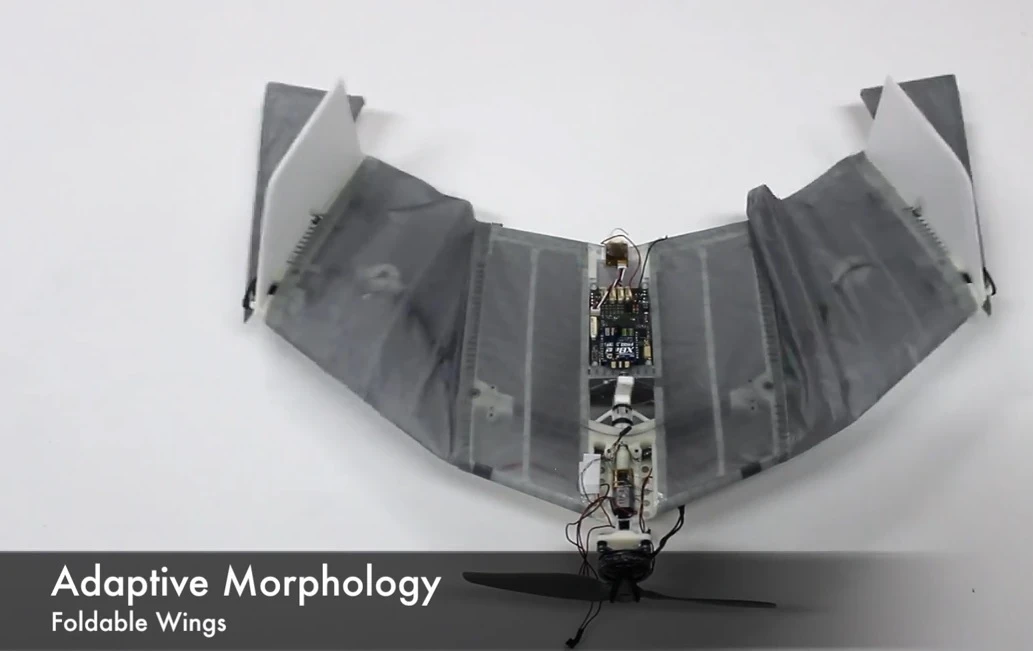
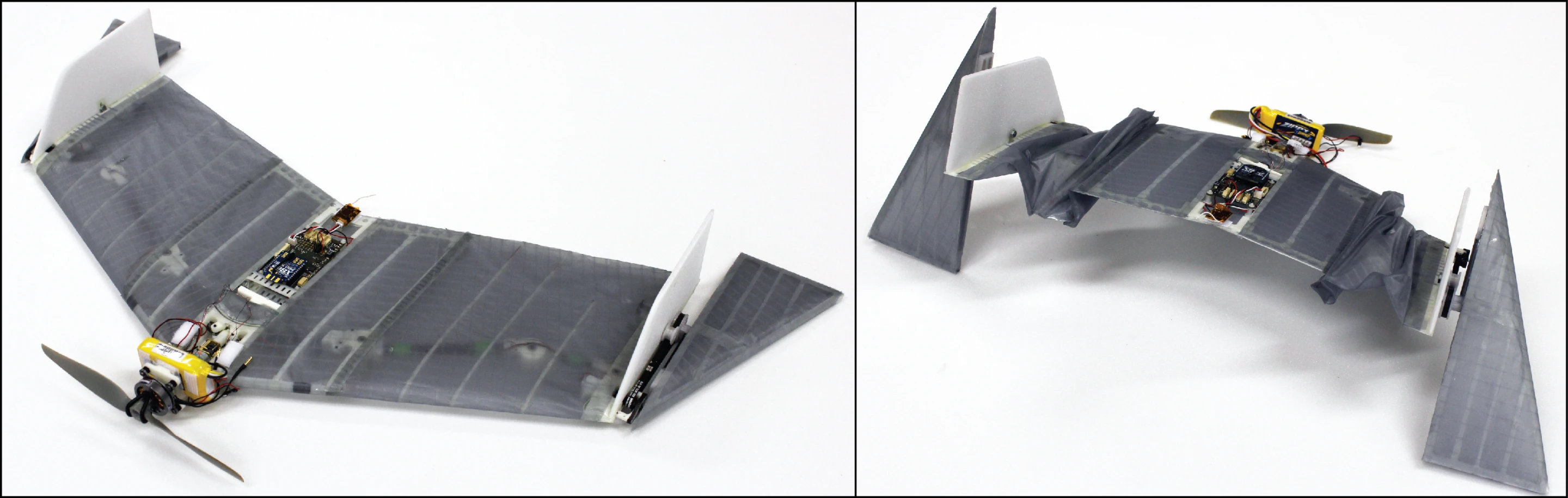
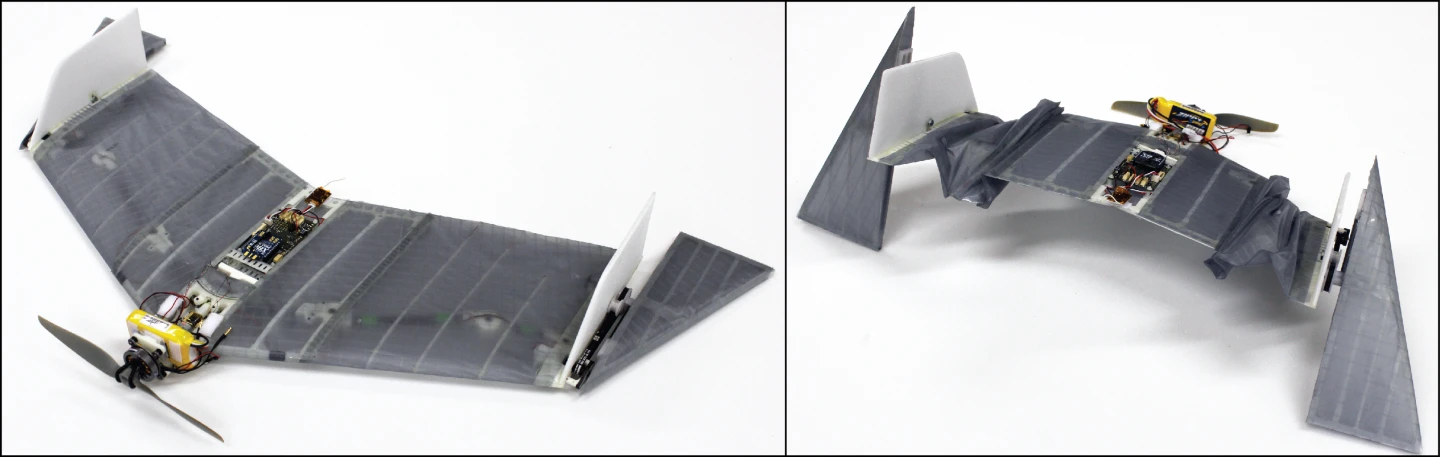
By studying and emulating the behavior of the vampire bat, the team created a wing covered in soft fabric that folds into a smaller space when on the ground and rotates around a hinge attaching the whegs to the body. This deformable and retractable wing morphology solves the issue in producing a drone capable of ambulation over ground due to the different center of mass requirements needed for flying and walking.

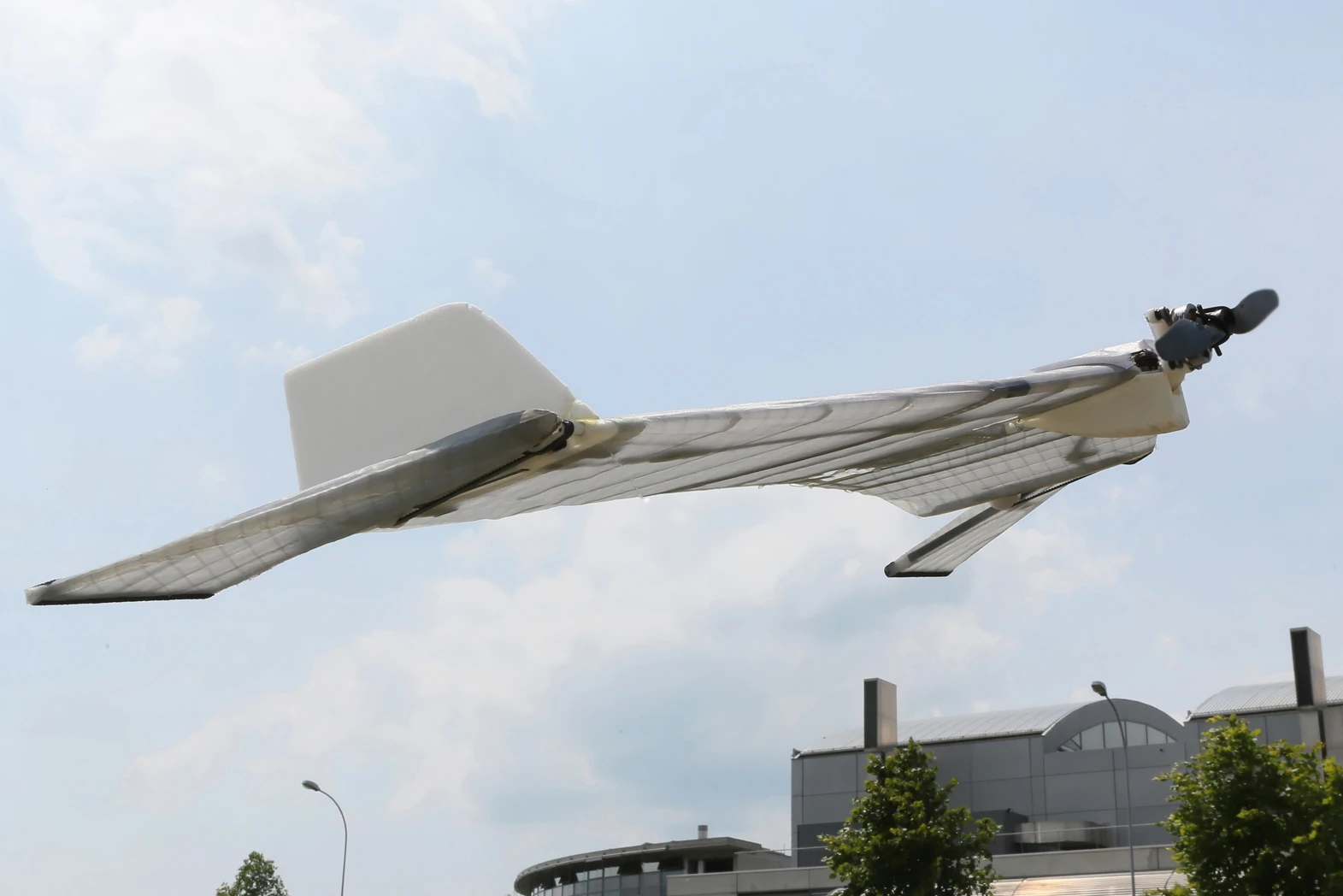
"The robot consists of a flying wing with adaptive morphology that can perform both long distance flight and walking in cluttered environments for local exploration," said Ludovic Daler, lead researcher and Ph.D student at EPFL. "The robotʼs design is inspired by the common vampire bat Desmodus rotundus, which can perform aerial and terrestrial locomotion with limited trade-offs."
To achieve these limited trade-offs, the researchers experimented until they found the ideal distance between the center of mass of the drone and the axis of rotation of the wingerons, in order to improve energy efficiency. As a result, this optimum balance of masses allows the DALER to reach speeds of about 70 km/h (45 mph) in the air and around a 6 cm/s (2.5 in/s) on the ground, with a maximum step distance of approximately 6 cm (2.5 in).
The EPFL team believes that the versatility of a walking and flying drone would be of great assistance in helping to locate survivors in dangerous or unstable areas after a natural disaster. The researchers see DALER remotely deployed to an affected area, where it would fly to an area of damaged buildings or destroyed infrastructure and then land to begin walking around to find victims, thus leaving human rescue teams to concentrate their efforts on moving large amounts of people in open areas.
The researchers also claim that potential future developments of their drone will include possible hover capabilities and the ability to take off autonomously from the ground after a mission and to return to base automatically.
The DALER is still in the prototype stage, and no announcement has been made as to any future commercial development.
The research was published in the journal Bionspiration and Biomimetics.
The short video below shows the DALER in action.
Source: EPFL





