
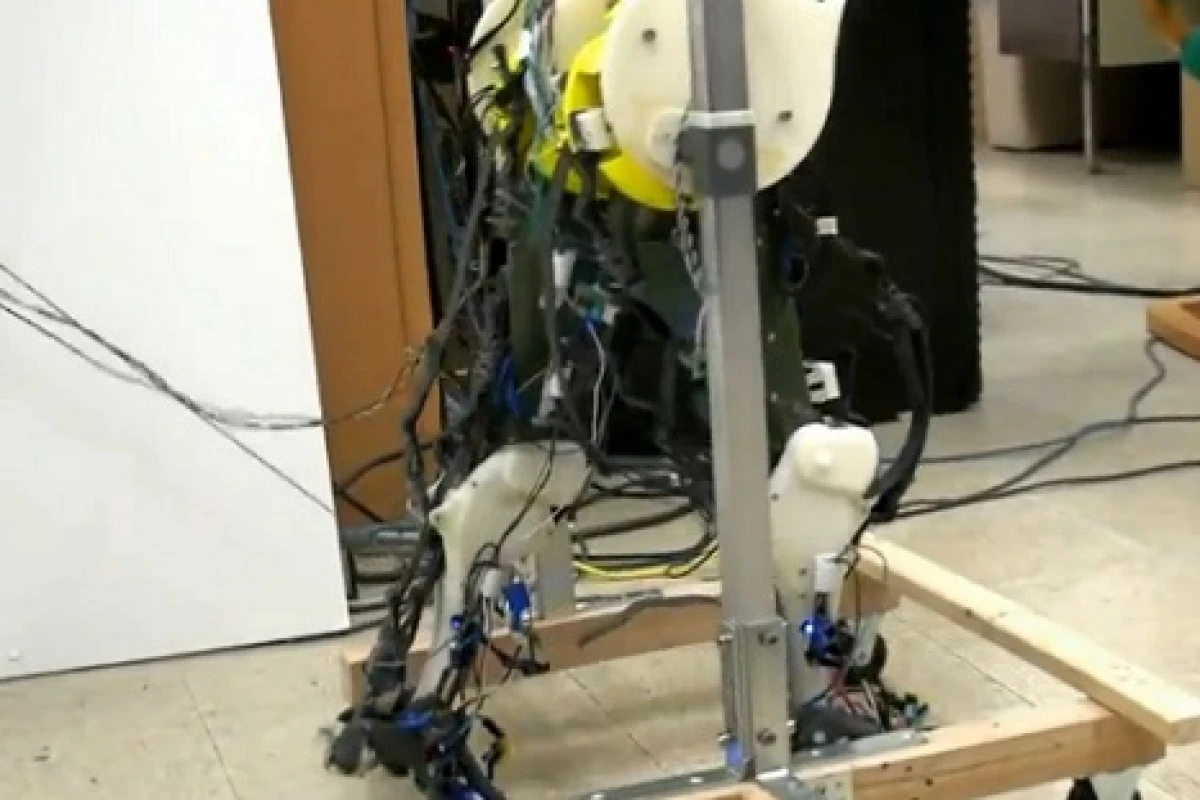

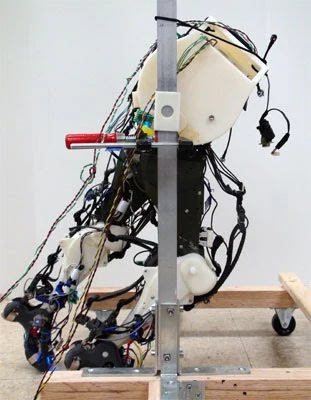
Moving forwards on two legs is one thing, walking with a recognizably human gait is quite another. While most humanoids have mastered the former, the latter is beyond the reach of most bipedal robots (though some are doing a good job at it) ... and there is a good reason for that. Recreating the way humans walk takes recreating the entire walking apparatus, complete with the skeletal, muscular and neural systems. That’s exactly what a group of researchers from the University of Arizona have done, creating what is reportedly the most biologically accurate set of robotic legs to ever walk the planet.
The machine comprises simplified versions of the human neural, musculoskeletal and sensory feedback systems. The goal of recreating the human walking gait with this unprecedented level of accuracy is for the scientists to better understand the processes that take place when we walk, and to provide a more definite answer to the question of how humans learn to walk in the first place. Then, it is hoped, this understanding can be translated into devising better ways to help spinal-cord-injury patients recover their ability to walk.

The robotic legs are unique in that they are controlled by a crude equivalent of the central pattern generator (CPG) - a neural network located in the spinal cord at the abdominal level and responsible for generating rhythmic muscle signals. These signals are modulated by the CPG as it gathers information from different body parts responding to external stimuli. As a result, we are able to walk without ever giving the activity much thought.
The most basic form of a CPG is called a half center and is made up of two neurons rhythmically alternating in producing a signal. An artificial version of a half center produces signals and gathers feedback from sensors in the robotic limbs, such as load sensors that notice when the angle of the walking surface has shifted.
"Interestingly, we were able to produce a walking gait, without balance, which mimicked human walking with only a simple half-center controlling the hips and a set of reflex responses controlling the lower limb" said Dr Theresa Klein, co-author of the study. The current hypothesis is that, even before they learn to walk, babies already have a simple half-center, just like the one in the robot. As they gain more experience, the neural network learns how to support more complex walking behavior.
"This underlying network may also form the core of the CPG and may explain how people with spinal cord injuries can regain walking ability if properly stimulated in the months after the injury," added Dr Klein.
Check out the video below to see the biologically accurate robotic legs in action.
Source: RNSL University of Arizona





