


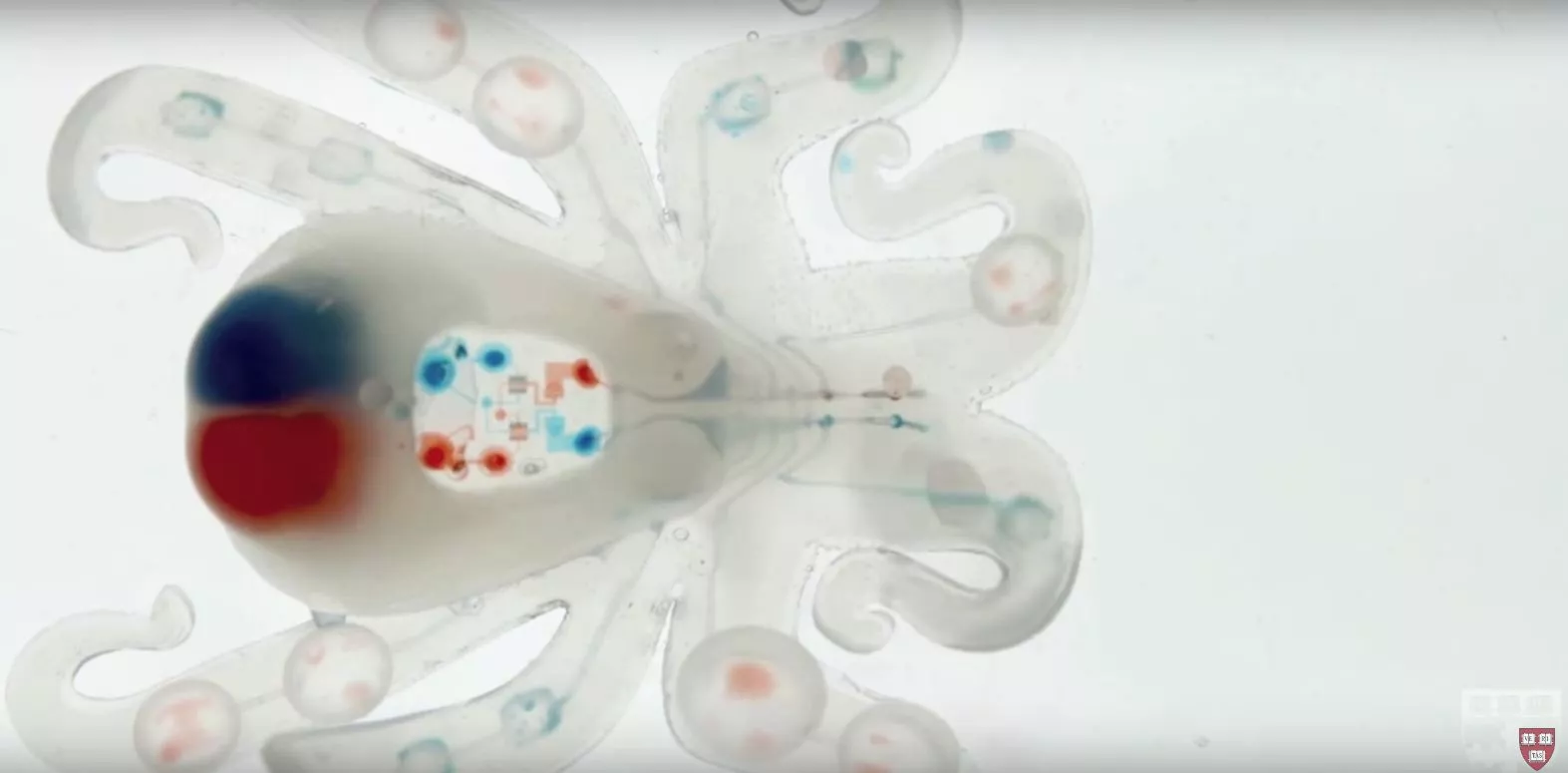

Harvard engineers have come up with a robot octopus that is made entirely of soft materials, is autonomous, and requires no tether to operate. The Octobot combines 3D printing, mechanical engineering, and microfluidics to create what could be the first in a new generation of soft, autonomous machines.
If you're going to make a soft robot, you could do worse than choose an octopus as inspiration. The most intelligent of the molluscs and one of the most advanced invertebrates, its dexterity and ability to manipulate are all combined with a body completely without hard parts save for its beak, which robots don't need. This makes it an ideal model for soft robots that strive to go beyond mechanical worms, but there's more to making a soft robot than choosing an animal to mimic.
The current generation of soft robots are limited in that they aren't entirely soft. Many of them include hard components, such as heating wires, batteries, and circuit boards for control systems, or they're tethered to some sort of outboard power and control source.

To remove these obstacles, a team led by Harvard researchers Robert Wood and Jennifer A Lewis developed the Octobot, which not only does away with any sort of internal skeleton, but moves using a pneumatic system. In this case, it's a series of tubes and bladders powered by hydrogen peroxide. When the highly reactive peroxide encounters a platinum catalyst, it decomposes into water vapor and oxygen.
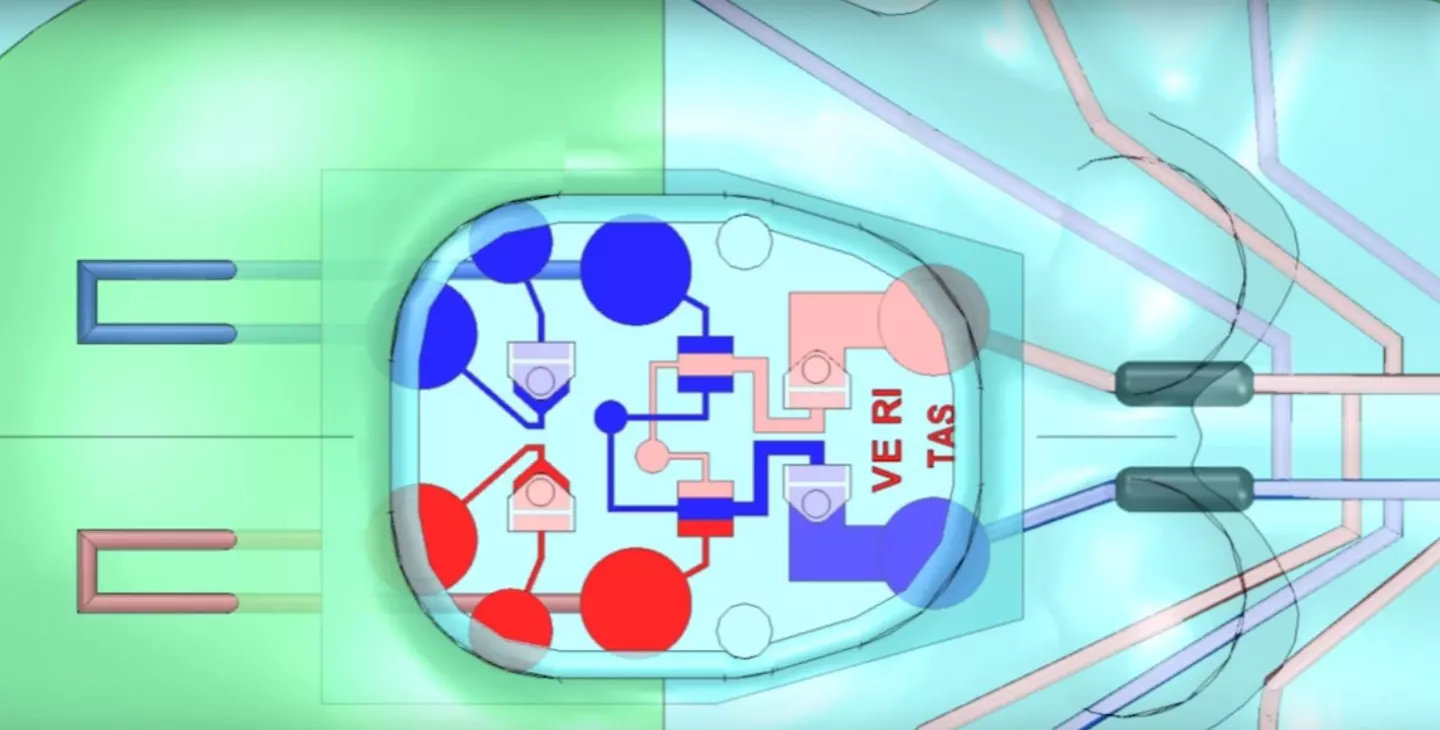
As this mixture expands, it causes the Octobot's tentacles to move. But the clever bit is that this simple reaction is controlled not by electronics, but by a soft analog of a simple electronic oscillator that guides and regulates the robot's movements to perform desired functions.
Another aspect of Octobot is that it's built using a hybrid assembly process that combines soft lithography, molding, and 3D printing. The latter is particularly important because it allows the engineers to rapidly fabricate the fuel storage, power, and actuator systems directly inside the soft robot to create an integrated design.
The Harvard team hopes that this proof of concept will lead to more complex versions of Octobot. In that meantime, they are working on how to get the robot to swim, crawl, and otherwise interact with its environment.
"One long-standing vision for the field of soft robotics has been to create robots that are entirely soft, but the struggle has always been in replacing rigid components like batteries and electronic controls with analogous soft systems and then putting it all together," says Wood. "This research demonstrates that we can easily manufacture the key components of a simple, entirely soft robot, which lays the foundation for more complex designs."
The research was published in Nature.
The video below explains how Octobot gets around.
Source: Harvard






