

The development of robots capable of operating in a melange of disarray and hazards will allow relief agencies to reduce the danger to disaster victims and first responders alike. This is the goal of DARPA's multi-year Robotics Challenge, which in December will pit a variety of robots and software against a series of eight real-world tasks that might be encountered in actual disaster situations.
The DARPA Robotics Challenge is aimed at developing a robot that can work with humans at disaster sites, combining their strengths to overcome their weaknesses. While DARPA's Track A teams are developing their own robots as well as the software to attempt DARPA's challenges, Track B/C teams have been supplied with a Boston Dynamics ATLAS humanoid robot for which they will develop disaster-busting software.

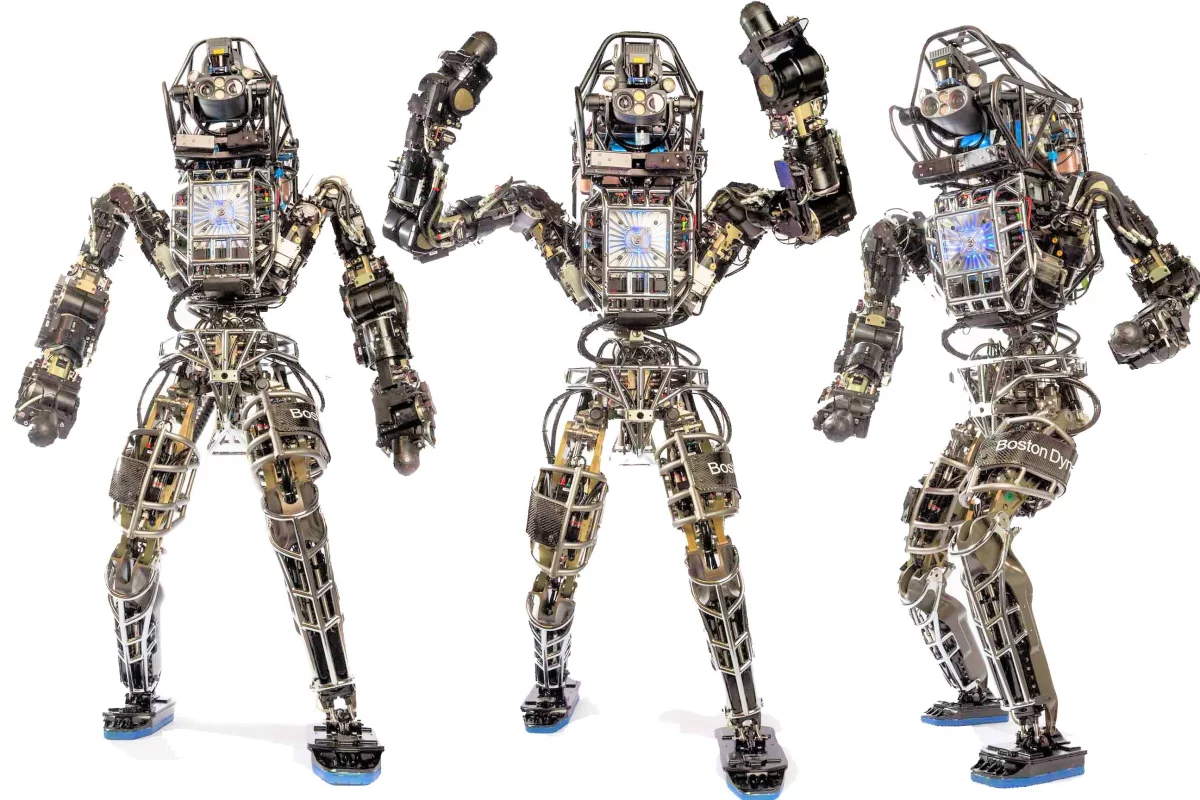
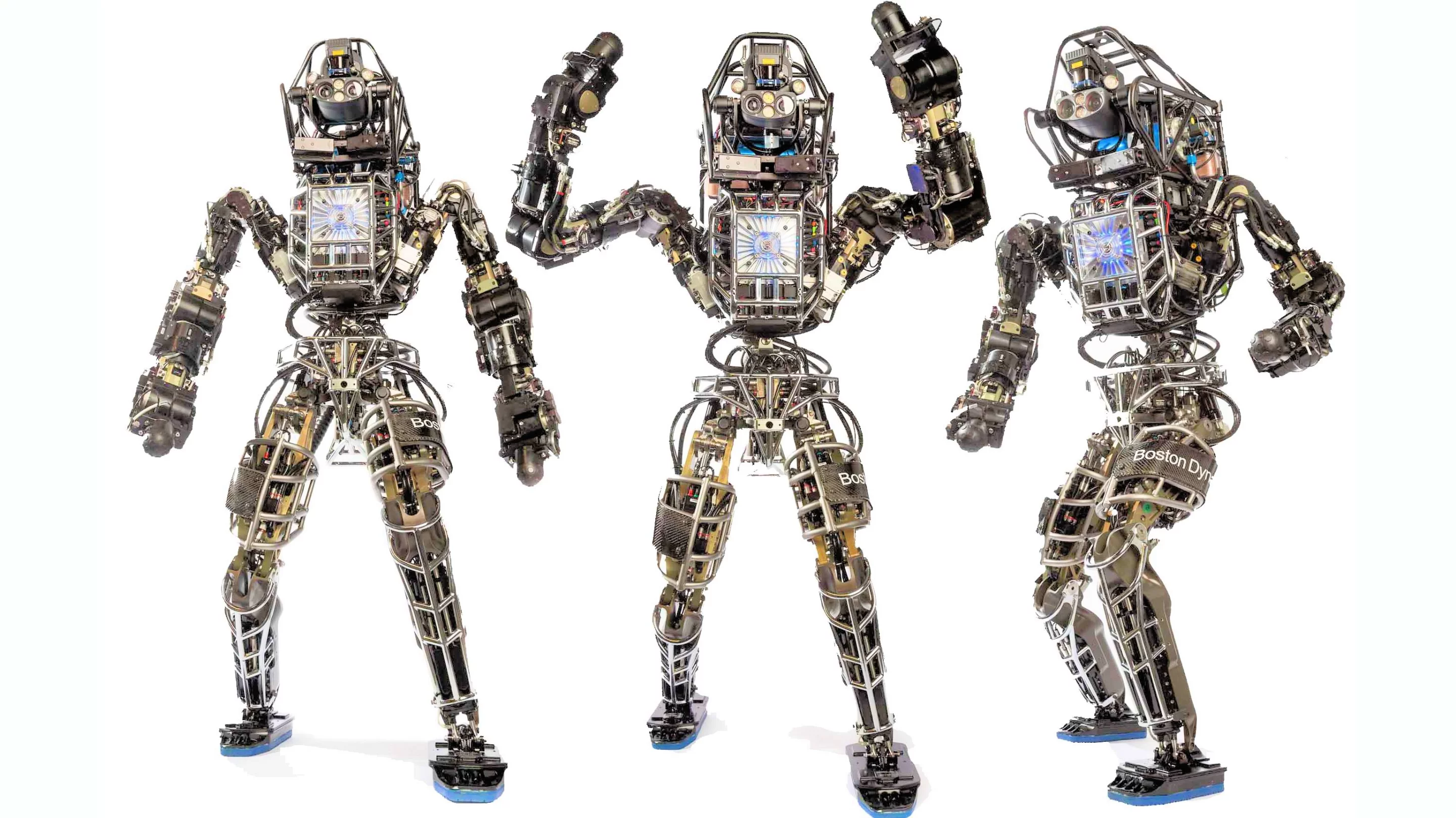
The ATLAS humanoid robot is 74 in (188 cm) in height, 30 in (76 cm) from shoulder to shoulder, 22 in (56 cm) thick at the chest, and weighs 330 lb (150 kg) with its hydraulic power controller. It has 28 degrees of freedom in its basic skeleton and features an on-board control computer to convert higher-level commands it receives into the lower-level commands that actually direct the robot how to move. The power (480 three-phase VAC at 30 amps) and commands (via 10 Gbps fiber optic Ethernet) are supplied through a tether.
The virtual first round of the challenge was completed in June, involving a competition taking place in the Robotics Challenge Simulator. Six Track A teams and seven Track B/C teams qualified to continue on to the DARPA Robotics Trials to be held at Homestead Speedway in Florida on December 20-21, 2013.
The Track B winner was Team IHMC, from the Florida Institute for Human and Machine Cognition, which took the competition with a score 25 percent higher than Worcester Polytechnic's second-place showing. They took delivery of their ATLAS on August 14, and wasted no time in transferring the virtual ATLAS's software onto this impressive piece of hardware.
While the ATLAS appears in the video above to be a bit weak at the ankles, this is the type of problem expected to appear when transitioning from a model of a robot to controlling the real thing. Hopefully it will all get sorted before the trials, in which we are likely to see if these robots can stand up after a fall. The Boston Dynamics video below further demonstrates the obstacle-beating and exceptional balance capabilities of the humanoid robot.
ATLAS is designed to be able to carry out a range of movements, so that the robot can use as many tools and accesses designed for human use as possible; for example, this Worchester Polytechnic utility vehicle modified for the ATLAS trials with a field computer and a 480 volt generator.

To test these abilities and skills in the December trials, all robots will be tasked to complete the following: Driving a utility vehicle, walking across rubble, restoring access to a blocked entryway, opening a door and entering a building, climbing a ladder and walking (or crawling) across a catwalk, finding and closing a valve to stop the flow from a leaking pipe, and attaching a fire hose or other connector.
While the overall disaster scenario can be envisaged from these tasks, in this December's trial they will be taken on one at a time. Multiple attempts will not be allowed, nor will safety harnesses. If you break your robot, you break your robot. Let's wish the participants better luck than that.
Source: DARPA


