

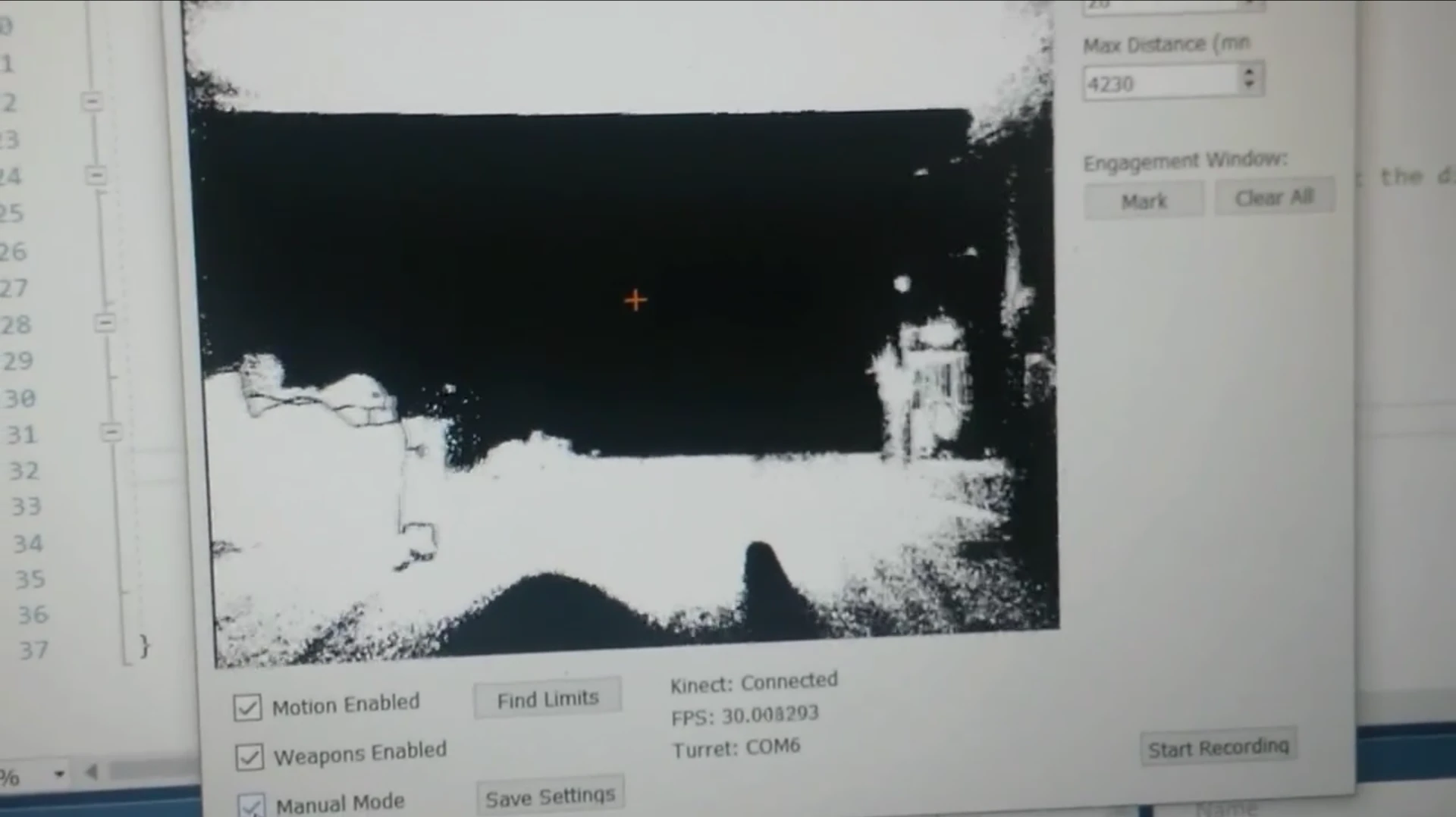


A technology-enthusiast has invented a Nerf gun turret that can automatically track and shoot down small drones. The ingenious contraption uses the Lidar capabilities of a Kinect v2 sensor, and a milled steel two-axis gimbal, all controlled by software based on the OpenCV AI library, which is geared towards realtime computer vision.
The turret is the handiwork of self-described engineer and inventor Drew Pilcher, who's been working on the turret for over five years.
"It just seemed like a cool project," he tells New Atlas. "I've always been really interested in the CIWS [close-in weapon system], so that was the inspiration. Since I shared the project a lot of people have suggested that this would be great for keeping animals out of gardens and other pest control."
But it wasn't until May 29 this year that the turret achieved the crucial milestone for any device designed to shoot down drones: it shot down a drone – a Tiny Whoop micro-drone, to be precise. The difficulty is a result of getting all the constituent parts to work together, Pilcher explains.
"It was very difficult to get all the PC libraries to work with each other," he says. "The Kinect data doesn't come in in the same format as OpenCV expects, and the images OpenCV produces aren't the right format for the OpenGL GUI element. It was pretty easy to fire up some example code and get each part working separately, but to get them all working together in the same program took about 90 percent of the programming time. The tracking code and computer vision was easy by comparison."
The next day, Pilcher set up a camera to capture a video of the drone in action. Here is that video, which shows the turret shooting down several drones:
The project is impressive for a host of reasons, not least being that Pilcher designed the steel gimbal in SolidWorks, before cutting it out with a computer-controlled mill. To these, he added a US$375 Sherline 4-inch rotary table to each axis, each accurate to a fortieth of a degree.
Was it hard to stay motivated over five years, we ask? "Yes definitely," says Pilcher. "I'm just doing this project for fun, so if I'm not enjoying the work, I'll stop and work on something else. Consequently there were spans of months where it just sat on the shelf. I keep coming back to it though."
Also impressive is the fact that Pilcher built an auto-loading mechanism for the Nerf gun, which fully integrates with the controlling software.
Pilcher hopes to speed up the reloading mechanism in future updates, but may put the project back on the shelf for a while.
"I pushed hard to hit the milestone of shooting down a drone," he tells New Atlas. "Now that I've done that, I might take a break on this project for a while. I do already have a long list of improvements I would like to make. For example, I want to improve the engagement window system so that it can ignore stationary objects. I also want to add the ability to lead targets."
Source: Hackaday





