



Flapping-wing ornithopter drones may potentially be more agile and energy-efficient than their fixed-wing counterparts, but most of them still can't loiter in one spot. A new model addresses that limitation by using a claw mechanism to temporarily perch in a bird-like fashion.
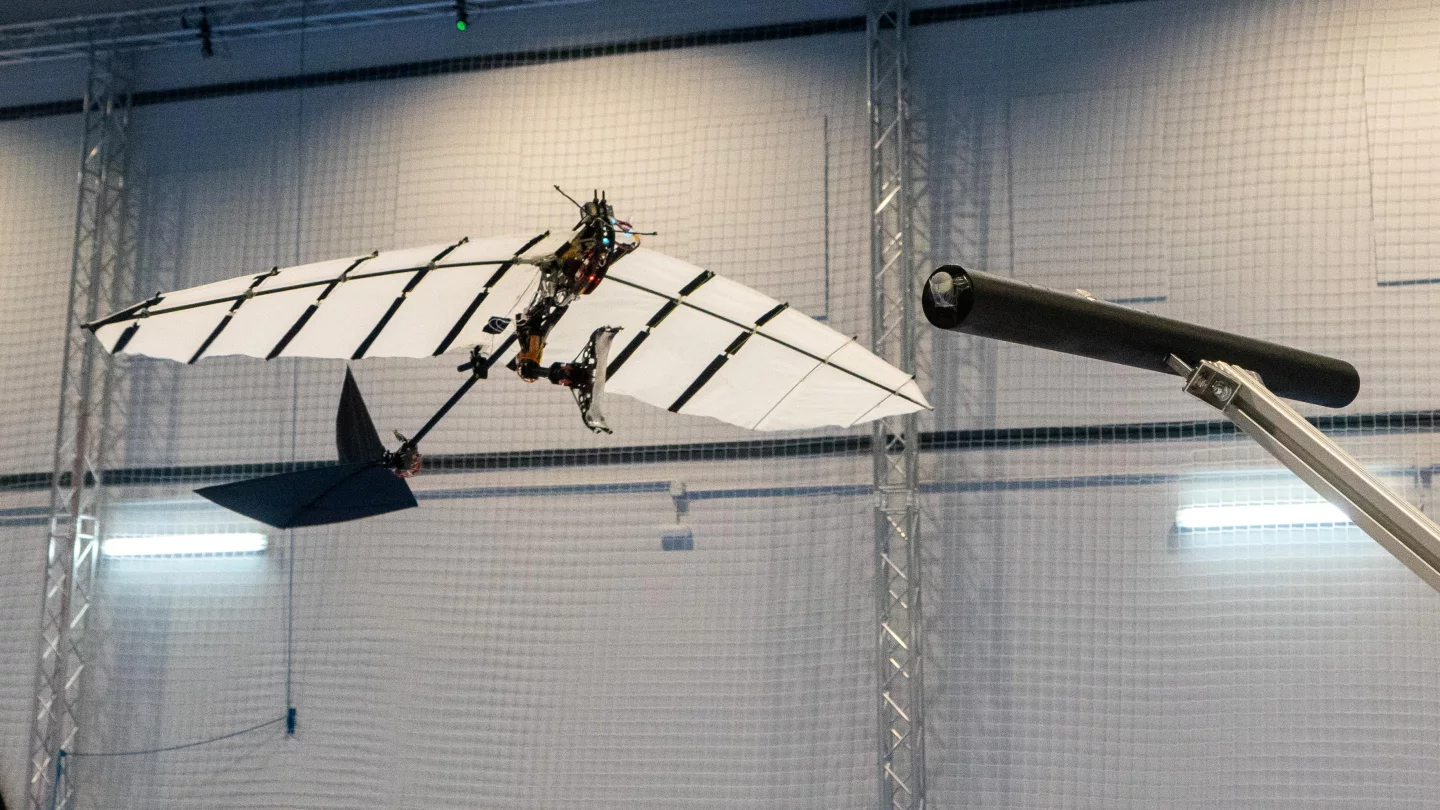
Named P-Flap (Perching Flapping-Wing Robot), the prototype autonomous ornithopter has a wingspan of 1.5 m (59 in) and tips the scales at just 700 grams (25 oz). It was designed by Raphael Zufferey, a postdoctoral fellow at Switzerland's EPFL research institute.
He built and tested the device in collaboration with colleagues at Spain's University of Seville, as part of the European Union GRIFFIN project. GRIFFIN stands for "General compliant aerial Robotic manipulation system Integrating Fixed and Flapping wings to INcrease range and safety."

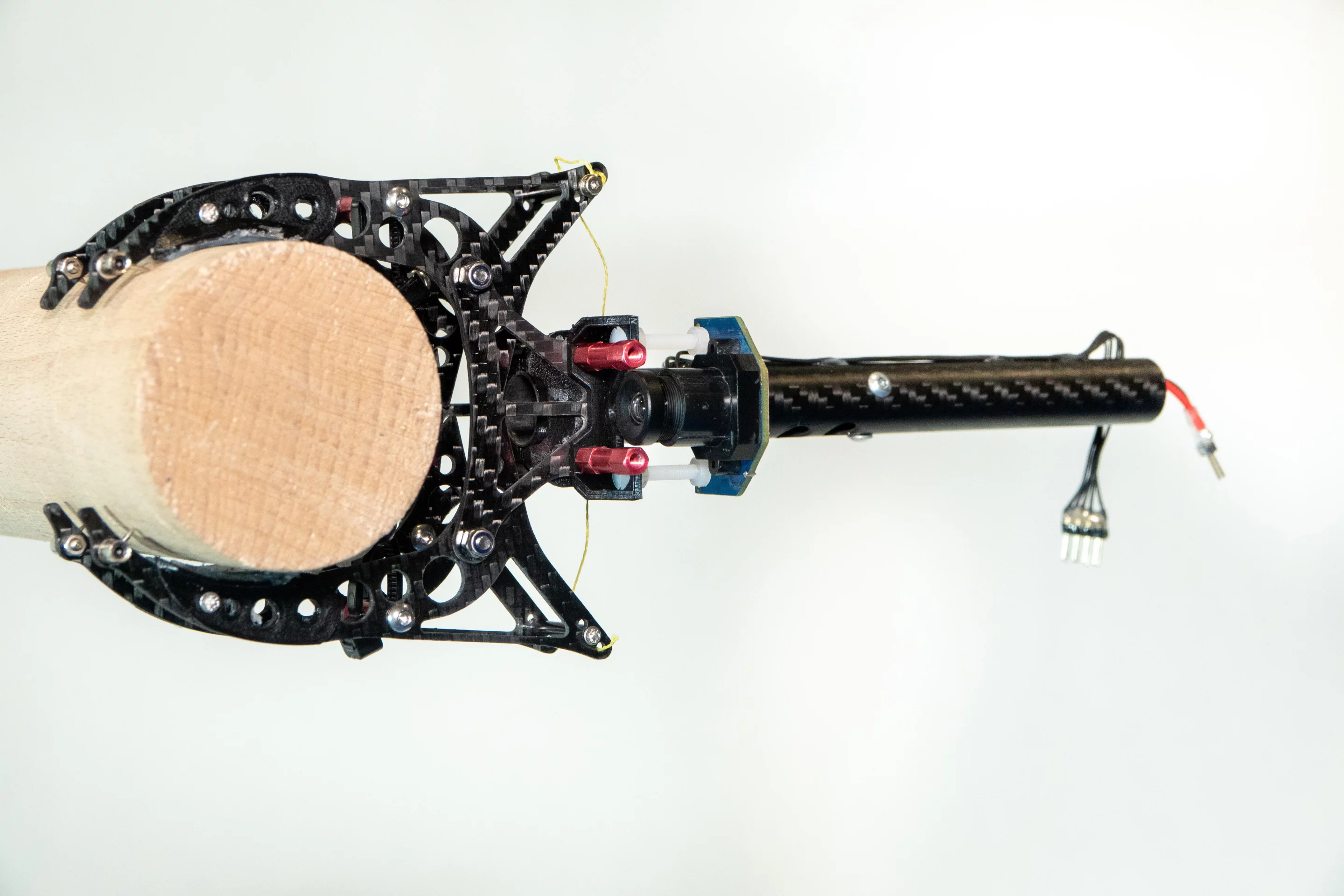
In order to grasp targets such as branches or pipes, P-Flap is equipped with a single carbon-fiber-bodied, spring-loaded mechanical claw. That device is bistable, meaning it requires no power to stay in both its open and closed states. It's connected to the drone's underside via a servo-activated leg, which can move it as needed.
As P-Flap approaches a horizontal rod in its current indoor testing setup, it's guided by data that's wirelessly transmitted from an external motion capture system. That data allows the drone to know its location relative to the rod, so its onboard flight control system can adjust its pitch, yaw and altitude in order to hit the target.
Once its claw gets to within 1 meter (3.3 ft) of the rod, a linear vision sensor in the base of the claw provides more exact positional data, activating the leg's servo to position it precisely. When two protrusions on the open inside of the claw subsequently hit the target, the pressure causes the claw to automatically close around the rod within just 25 milliseconds, holding P-Flap firmly in place.
When it's time to leave the perch and resume flight, a motorized screw mechanism in the shaft of the claw opens it back up again.
In a real-world scenario, the drone could conceivably perform activities such as observing land-based subjects, gathering biological samples from trees, or recharging its battery via integrated solar panels. That said, more work still needs to be done in the meantime.
"At the moment, the flight experiments are carried out indoors, because we need to have a controlled flight zone with precise localization from the motion capture system," said Zufferey. "In the future, we would like to increase the robot’s autonomy to perform perching and manipulation tasks outdoors in a more unpredictable environment."
P-Flap is described in a paper that was recently published in the journal Nature Communications.
Source: EPFL





