
While aerial drones can travel long distances quickly, aquatic drones can explore underwater environments. The TJ-FlyingFish offers the best of both worlds, as it's a flying quadcopter that is also able to make its way through the inky depths.
Currently in functional prototype form, the TJ-FlyingFish was developed by a team of scientists from China's Shanghai Research Institute for Intelligent Autonomous Systems, Tongji University, and the Unmanned Systems Research Group at the Chinese University of Hong Kong.
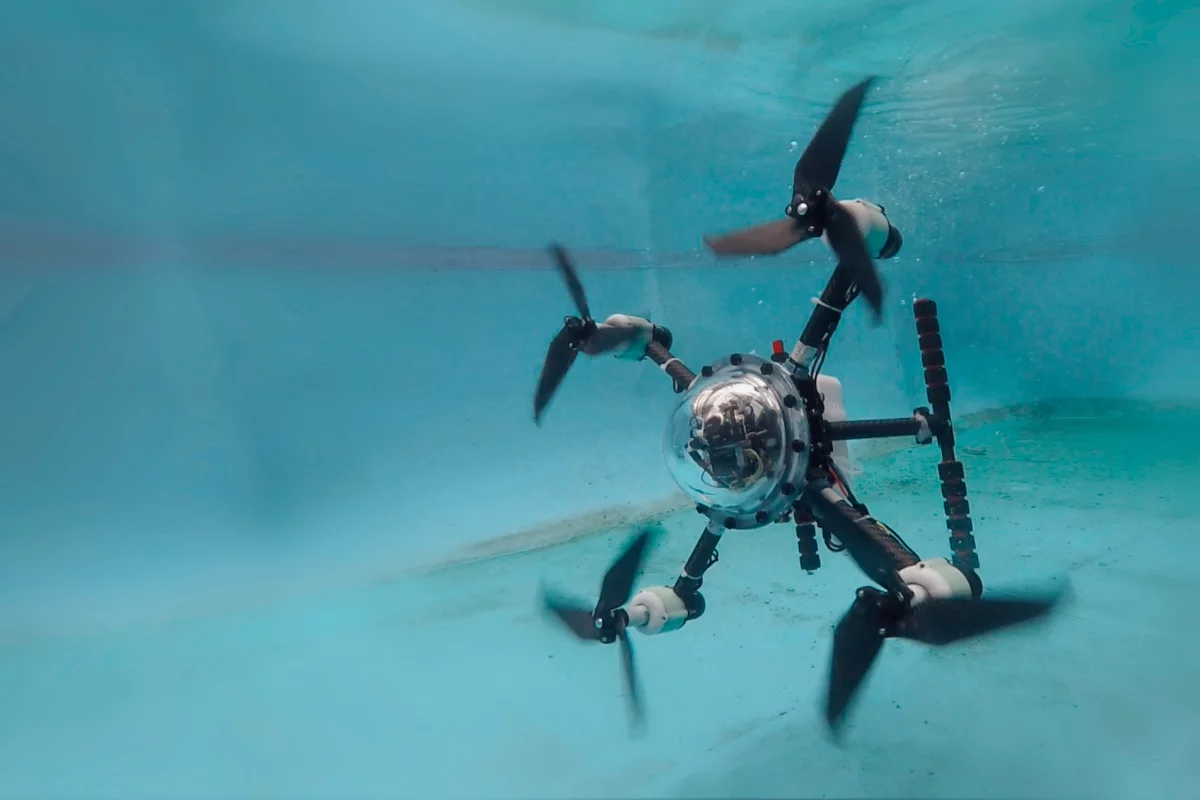
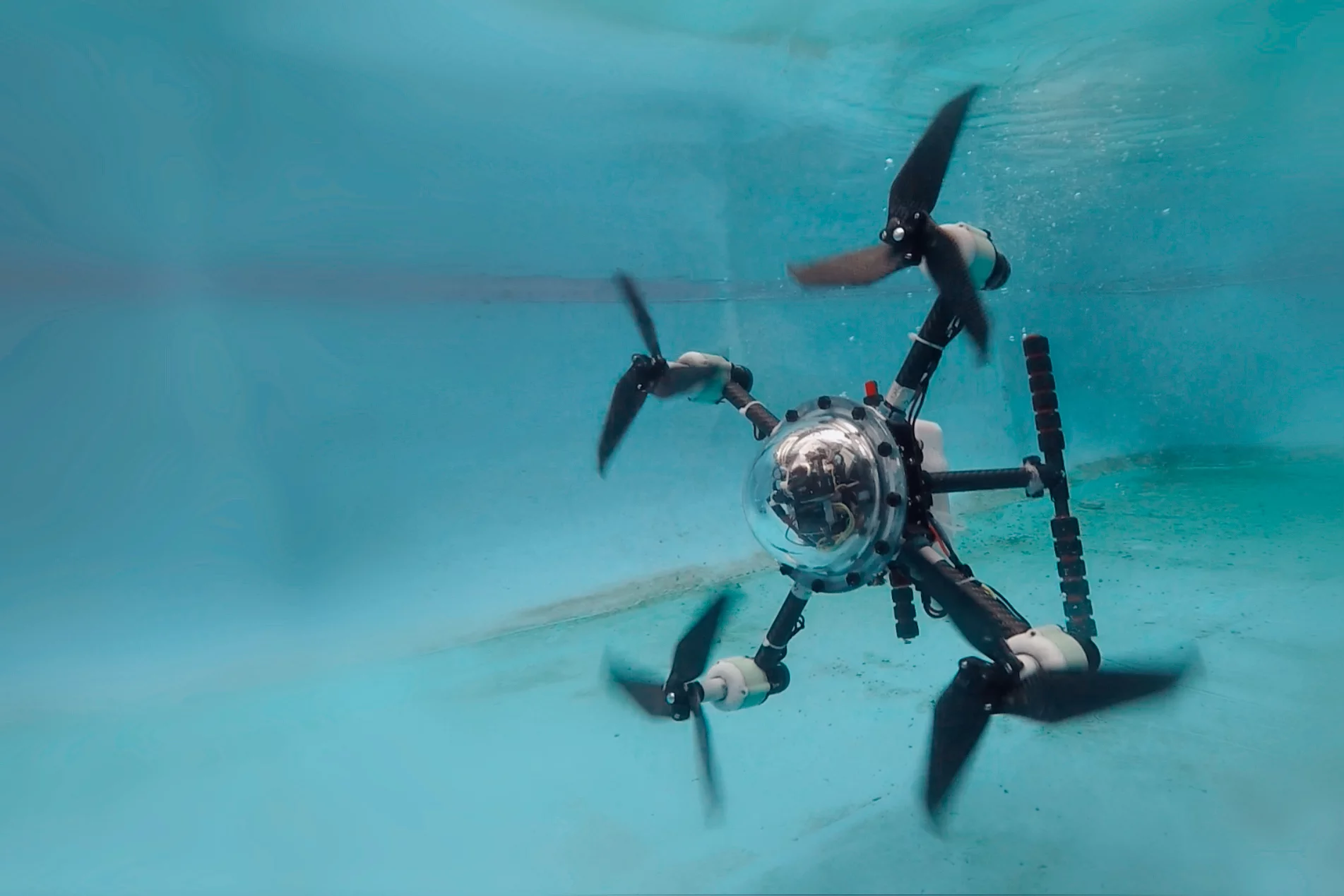
At first glance it looks much like any other quadcopter – it consists of a central domed body and four arms, each one of which has a propulsion unit (a motor/propeller module) at the end. However, each propulsion unit incorporates a special dual-speed gearbox, plus the arm on which it's mounted can independently rotate relative to the rest of the drone.
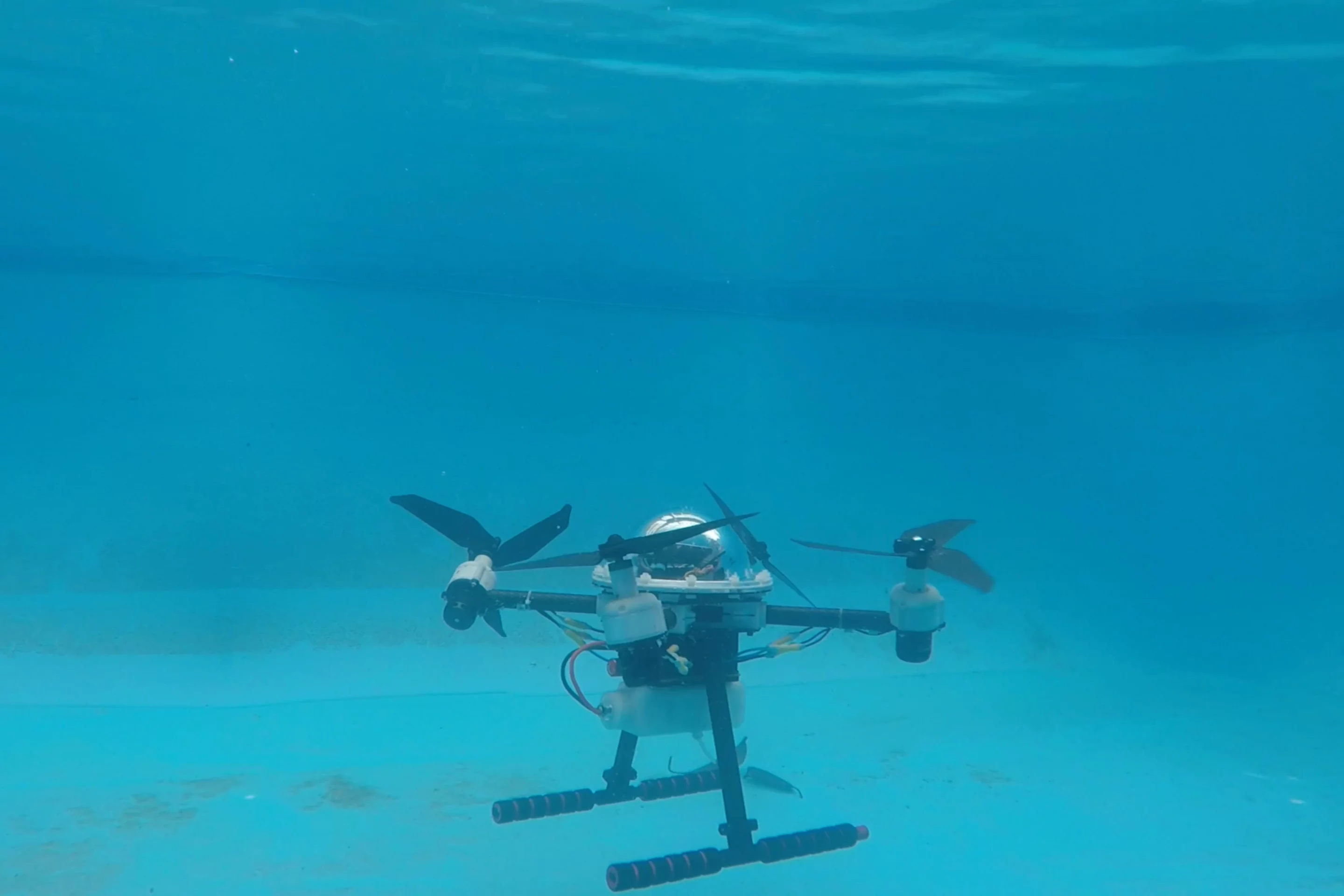
When the aircraft is in flight, all four of the units are facing upwards and spinning their props at the higher of the two speeds. Once it lands on the water, the units rotate to face downward and then spin at the lower speed, pulling the drone beneath the surface. In order to move both vertically and horizontally once it's fully submerged, the drone adjusts the angle and thrust of each propulsion unit as needed.
And yes, once it's done with being underwater, the drone can go back to the surface and fly away.
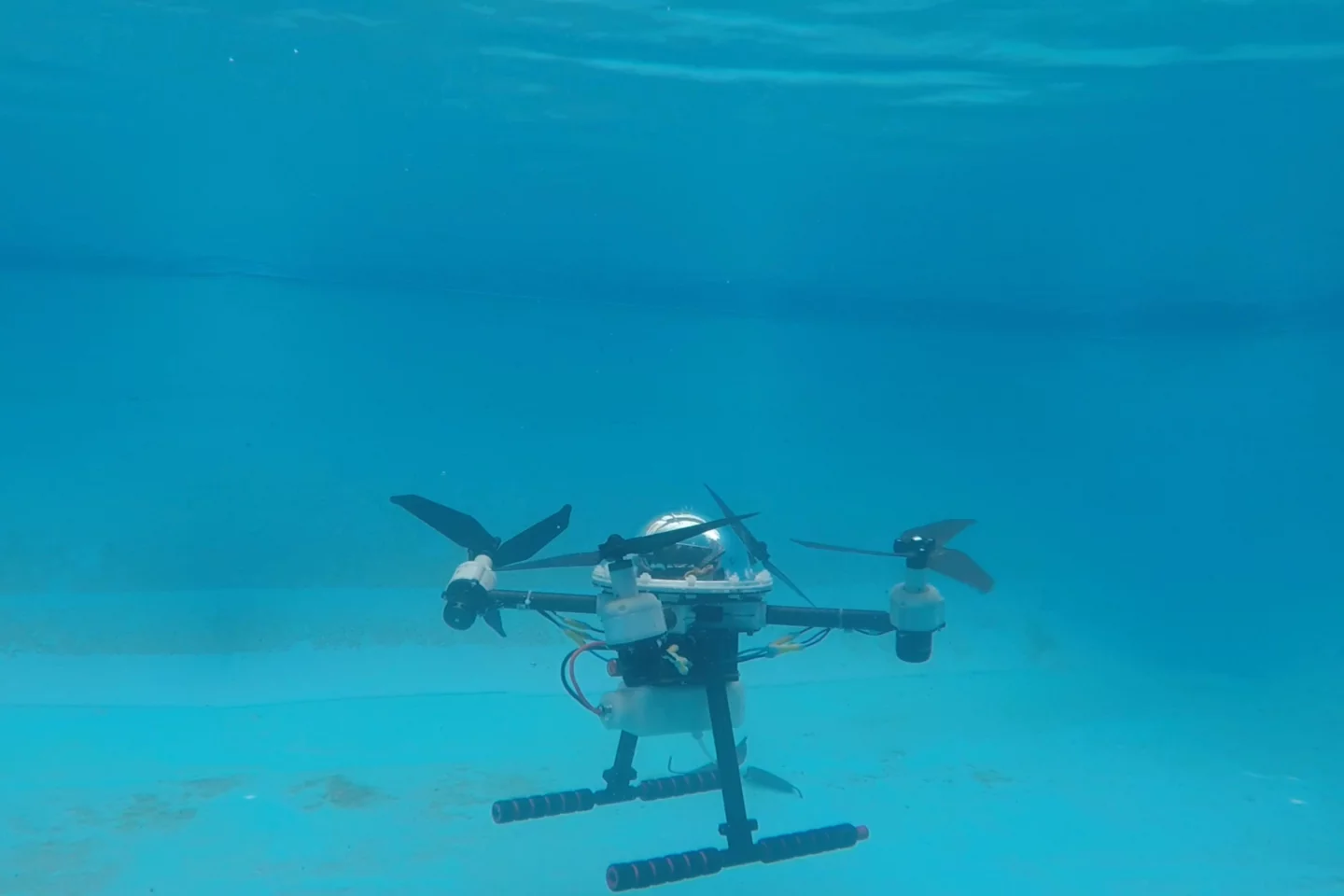
In its current proof-of-concept form, the 1.63-kg (3.6-lb) TJ-FlyingFish can hover for six minutes per battery-charge, or move underwater for 40 minutes. It's also capable of descending to a maximum depth of 3 m (9.8 ft), and has a top underwater speed of 2 m (6.6 ft) per second.
Additionally, Prof. Ben Chen from the Chinese University of Hong Kong tells us that the drone is completely autonomous, not requiring a "human in the loop" at any point in its amphibious journey. Possible applications for the technology include aerial/aquatic surveys, remote sensing, and search-and-rescue operations.
The TJ-FlyingFish can be seen in action, in the video below. Chen and colleagues will be presenting a paper on their research at the 2023 IEEE International Conference on Robotics and Automation, in London this May.
As an interesting side note, scientists at Oakland University previously developed a flying/underwater-swimming quadcopter of their own, known as the Loon Copter. It lands on the water horizontally, then pumps water into its buoyancy chamber, causing it to tilt down to one side. The drone then moves through the water using its now-vertical propellers, moving up and down by pumping water in and out of its buoyancy chamber.
Source: Chinese University of Hong Kong via New Scientist


