











Robots have become a mainstay of space exploration. From rovers to chatty anime robots on the International Space Station, they have already proven their worth in many ways. But what will the space robots of the future look like? The European Space Agency has released a video showing advanced robotics designs for lunar and planetary exploration. The concepts include multifunction robots designed for both autonomous space exploration and to aid astronauts in working on other worlds.
ESA has had a keen interest in robotics for decades and as the 2018 launch date for its ExoMars rover approaches, that interest grows ever keener. The new ESA video is designed to give us some idea of what future robot explorers will look like by showing them in action in a hypothetical lunar scenario.

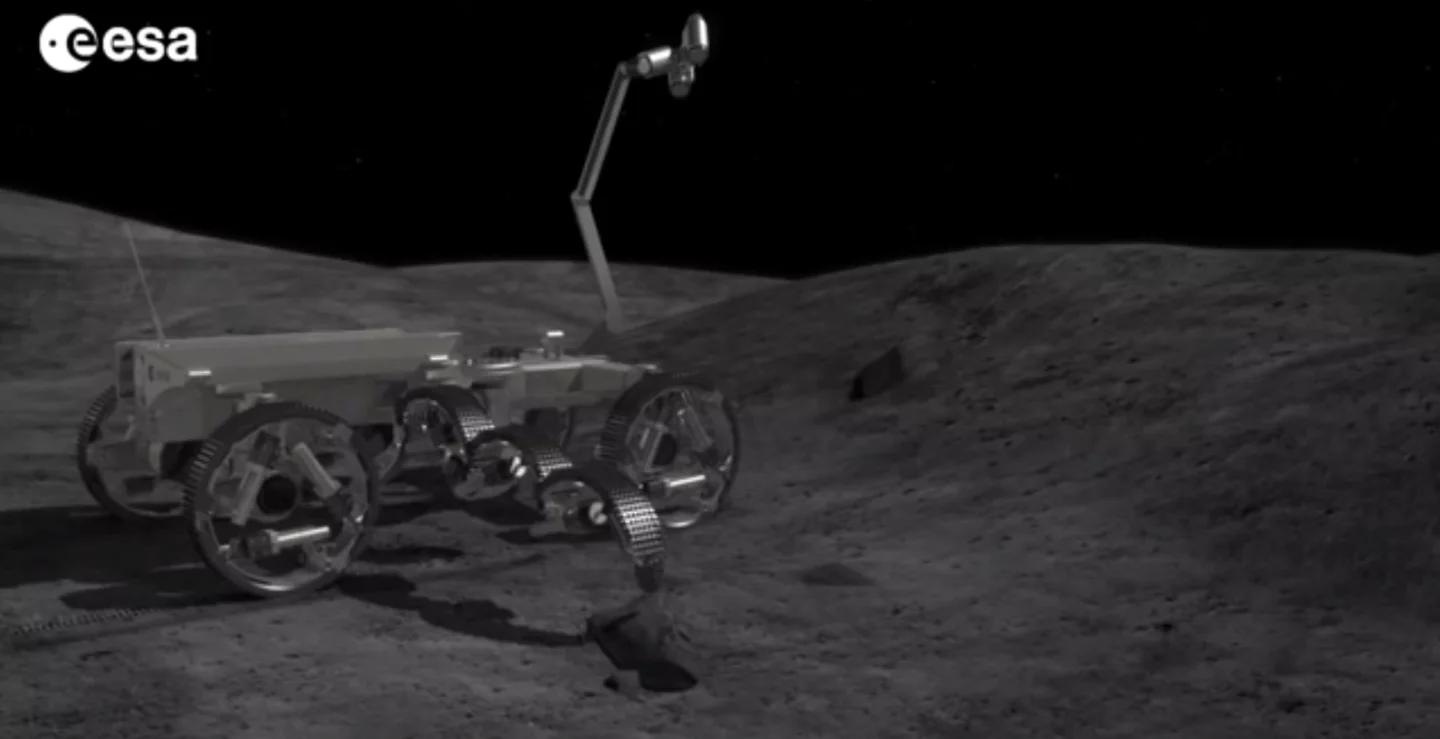
Here we see a concept of a future lunar rover using a laser to scan the terrain in front of it. In this case, the red of the laser indicates that it’s detected a rough, sloping terrain that will be difficult to navigate. The wheels of the rover may seem over complex and the general design of the robot a bit simple, but there’s a reason for this.

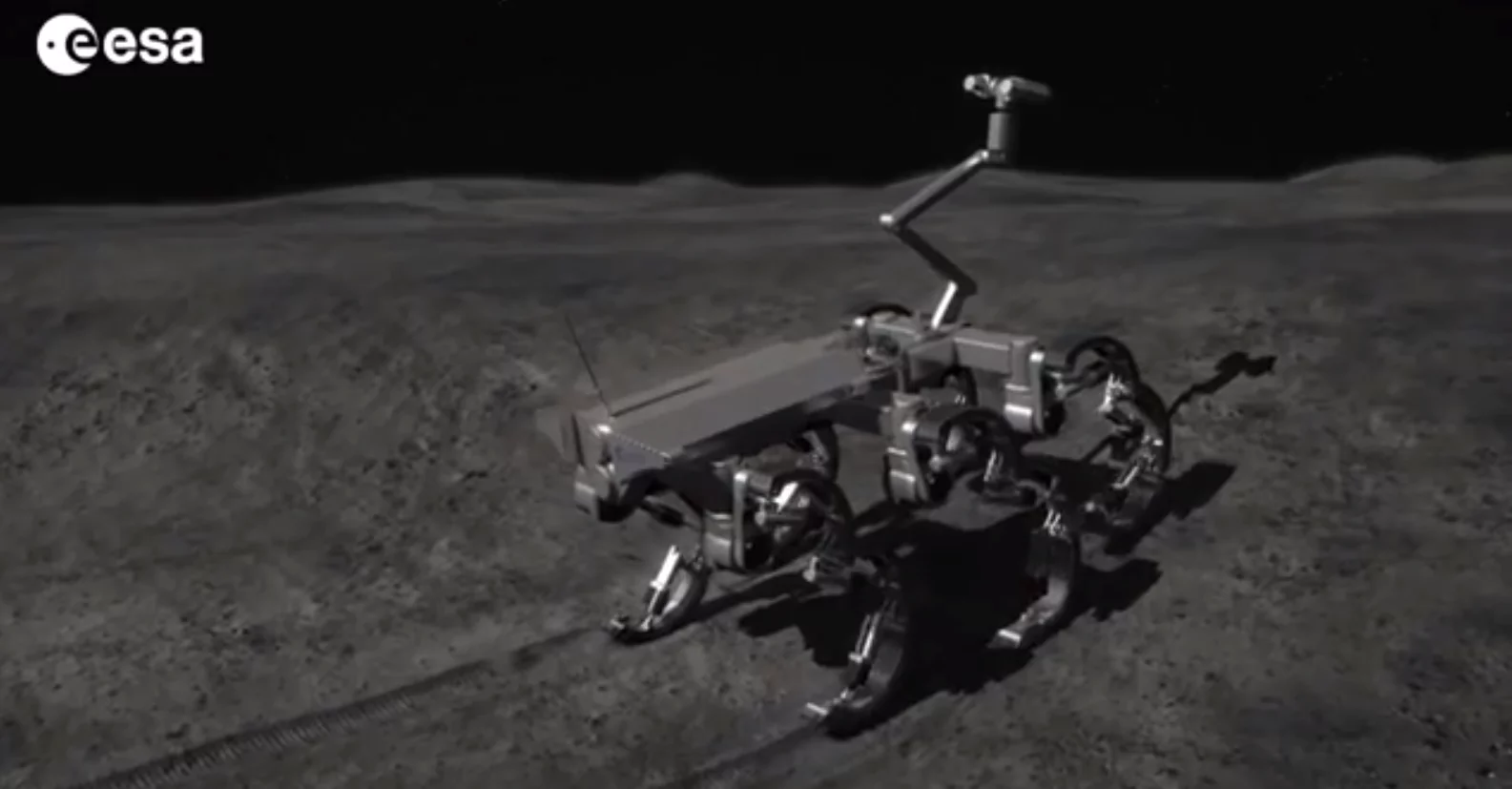
Instead of going around the slope, the rover unfolds its wheels to reveal that they transform into legs. It then scuttles up the hill like an insect.

Back on Earth, mission control follows the course of the rover using a virtual display of its activities. Here we see it identifying and mapping a rock for sample collection.
The transformer wheels on the rover aren't just for walking. They also take the place of arms. Here we see one that has unfolded, picked up a collection module from the rover, and is using it to take a sample of a rock.

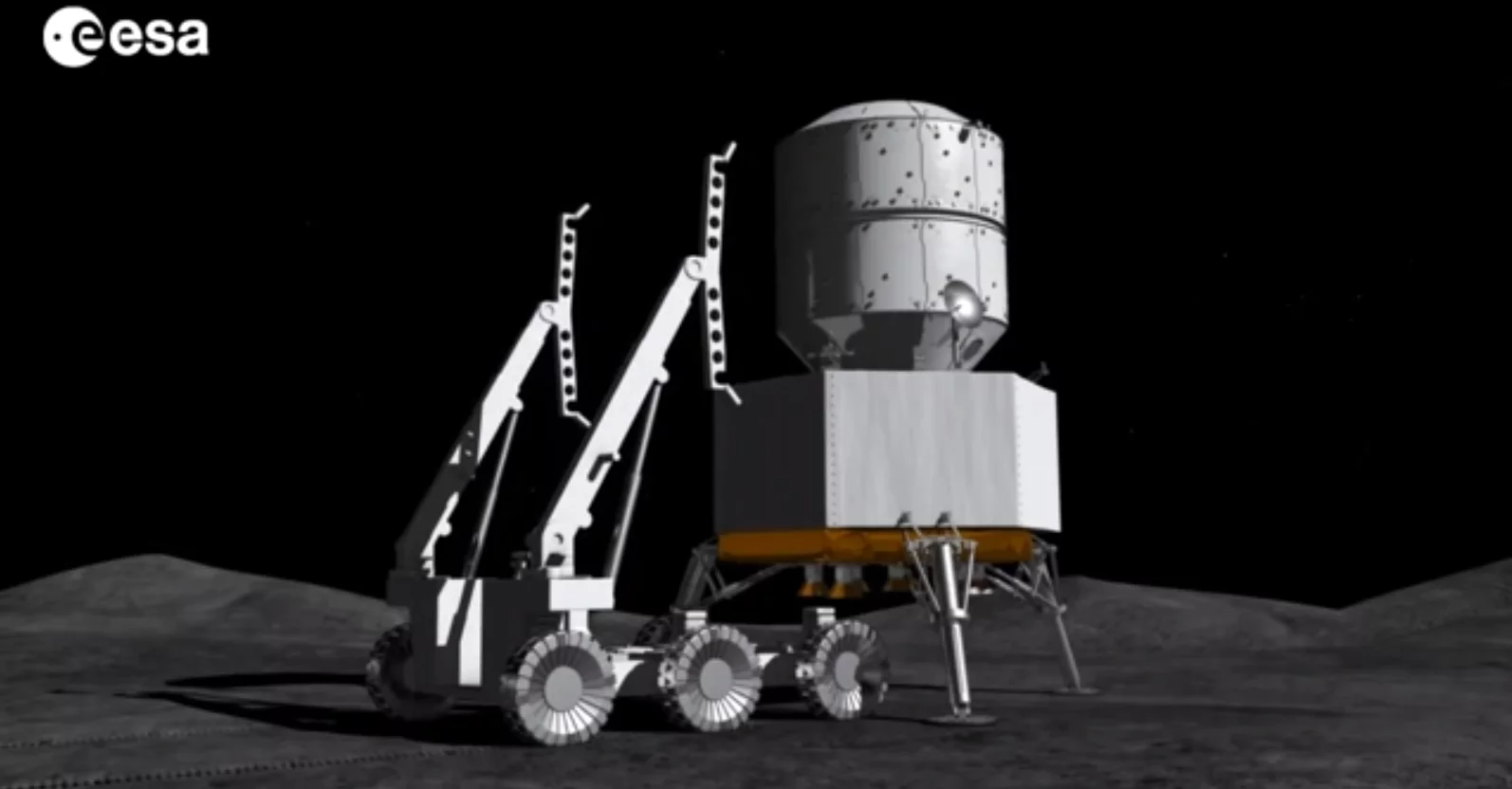
Over the years, there’s been a lot of talk about lunar colonization, but nobody seemed very interested in how you unload the cargo after it lands. ESA presents a solution with this robotic forklift designed to grapple cargo and other modules and carry them to the moonbase.

Here we see the module tucked on the robot lifter for transportation after prepositioning it for final offloading.

Once on site, the lifter now changes duty and positions the module to link to others used to make up the base. In this case, the module appears to be an airlock for a habitat.
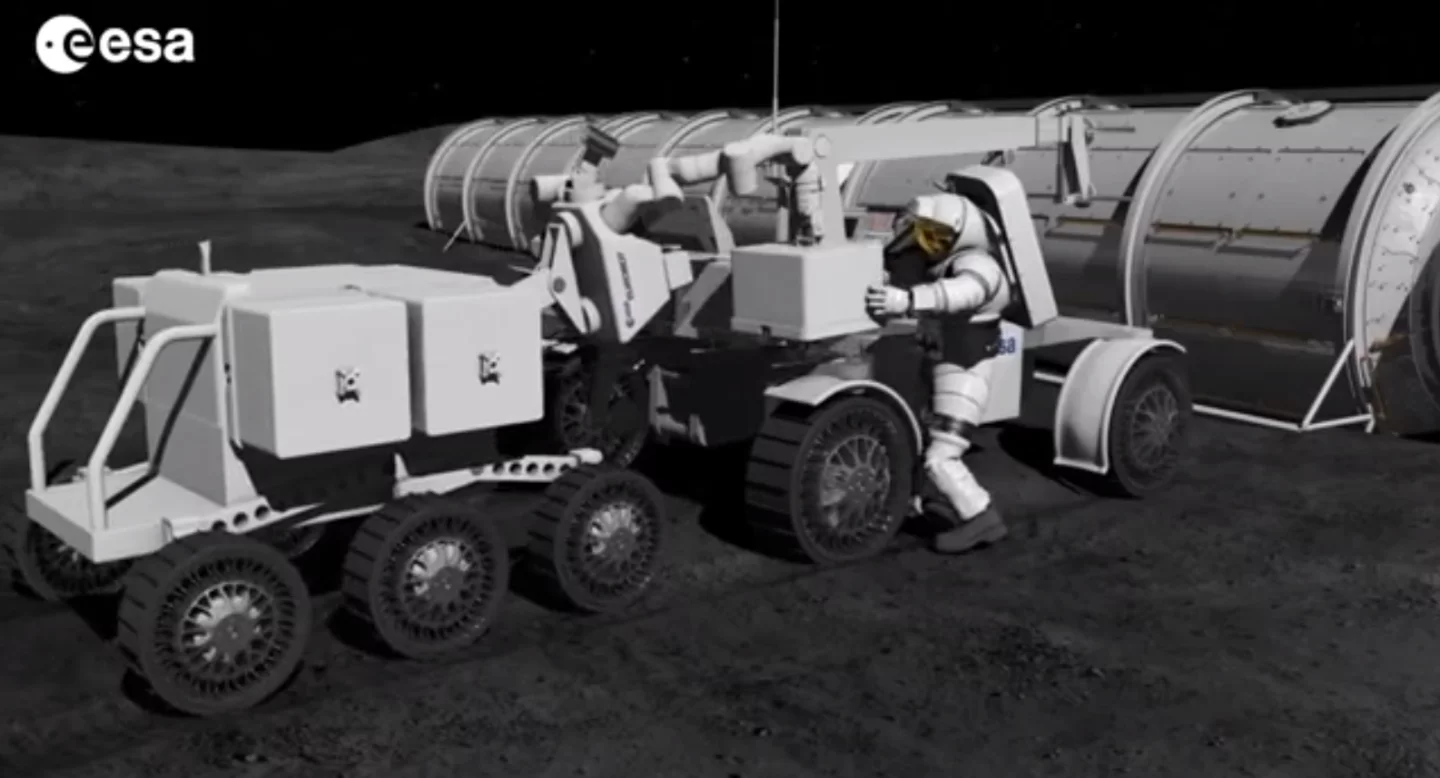
One vexing problem that has become familiar in building the International Space Station is that space construction isn't just a matter of docking modules together. There’s also the tedious work of hooking together power lines, air hoses, water pipes, data links, and so on. This fiddly work is hard enough on Earth, but on the Moon wearing gloves that are inflated plastic gauntlets, its like threading a needle with a hammer.

In the picture above we see an ESA concept teleoperator robot coupling a service line while an astronaut looks on. Depending on the sophistication of the system, the robot might either do this autonomously or under the guidance of an astronaut in a shirt sleeve environment inside the base.

Here’s one thing building a space station doesn't involve; moving dirt. With the module attached, an astronaut uses this service robot to push lunar soil up against the module to provide it with a foundation. Such earth-movers (or moon-movers) will be especially important in building lunar bases, since they’ll probably need to be buried under berms to protect them from cosmic radiation.
ESA also sees robots as all-round workhorses for space. Here we see a service robot assisting an astronaut in loading cargo or installing batteries on a rover unit.
The ESA video can be seen below.
Source: ESA



