
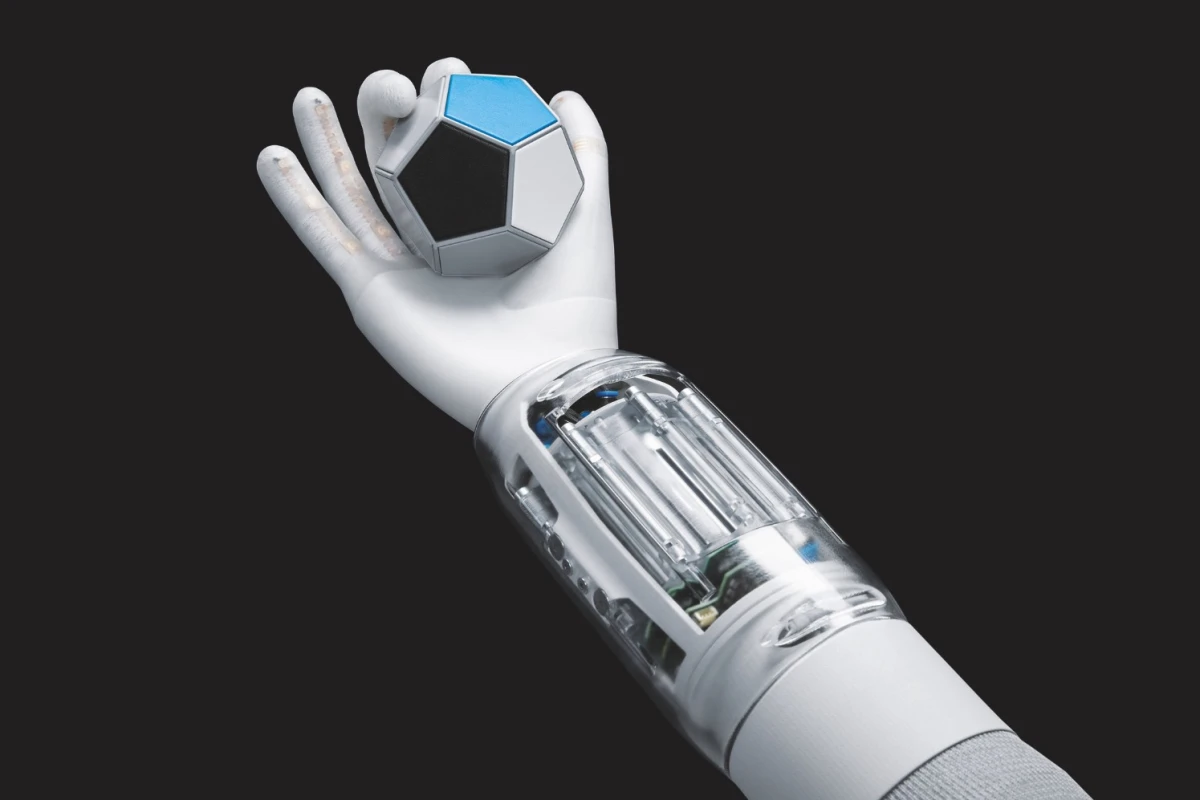



If you were using a robotic hand to manipulate delicate objects, you'd probably prefer that hand to be soft and gentle instead of hard and bony – plus it would help if the thing could teach itself how to perform tasks. Well, those are the selling features of Festo's new prototype BionicSoftHand.
Covered in a silicone skin, each of the hand's fingers consist of linked bellows-style air chambers, which are in turn made of a flexible knitted material. That material is composed of both elastic and high-strength threads – when one of the chambers is inflated or deflated, it will bend in a certain direction, depending on the distribution of those threads.
This means that as air is pumped in and out of the chambers via rubber tubes, the chambers expand and contract, causing the finger to open or close. All of those air tubes run into a single digitally-controlled valve terminal on the hand, from which just two other tubes run down the robot arm – one of those is for incoming air, and one for outgoing.
The joints between the chambers incorporate inertial sensors, plus the underside of each chamber additionally incorporates a tactile sensor, allowing the hand to"feel" what it's touching via the pressure exerted by that object.
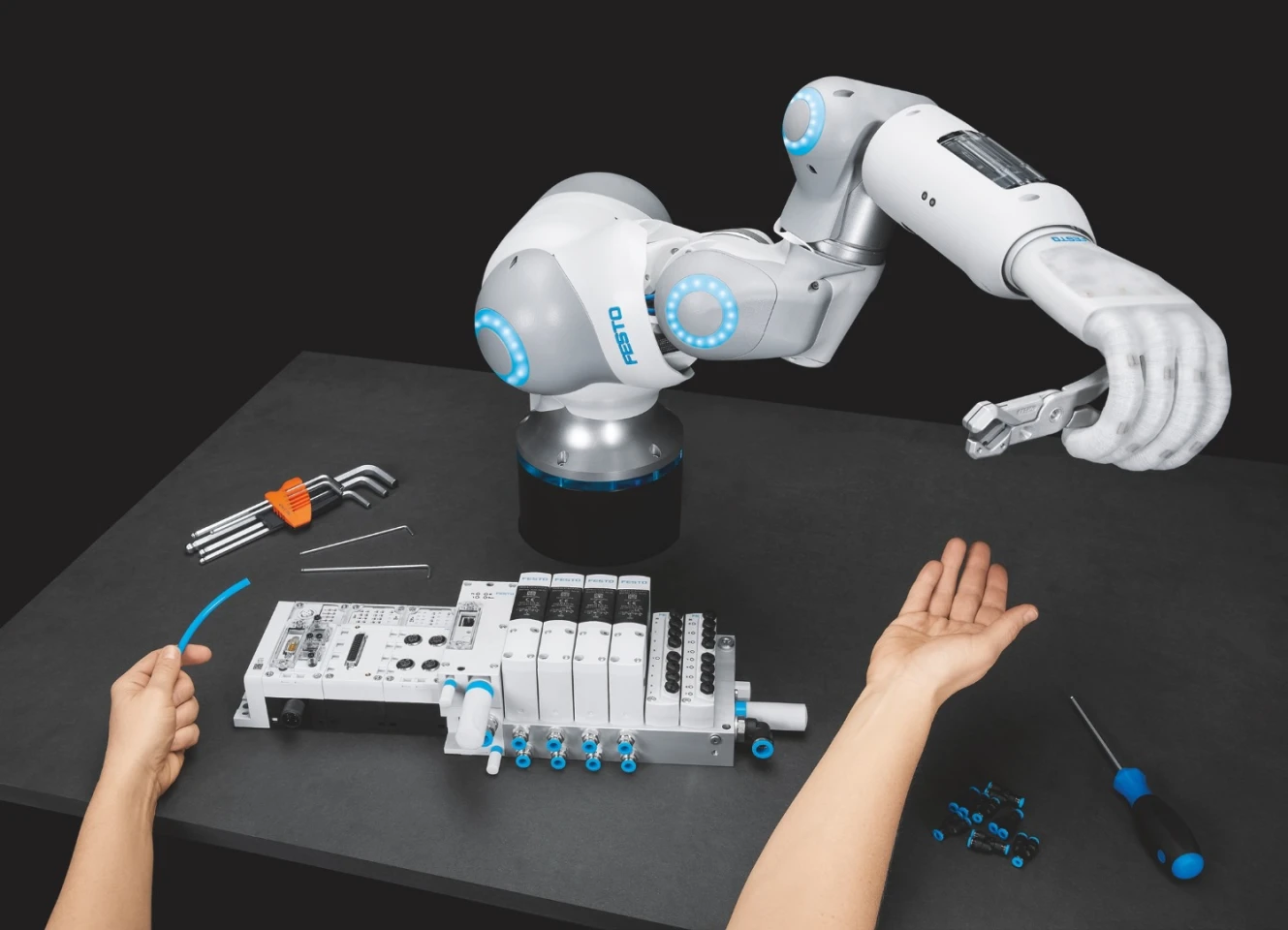
Instead of simply being shown how to perform a task, the BionicSoftHand is given an end goal, then left to use a trial-and-error process to figure out how to reach it. This involves utilizing a digital "twin" of the hand on a connected computer, which is created using a depth-sensing camera, and that uses artificial intelligence to learn what works and what doesn't.
The technology will be on display next month at the Hannover Messe trade show, along with Festo's BionicSoftArm – as you might have guessed, this is a pneumatic robot arm that works on the same principles as the BionicSoftHand. Both devices are part of the company's larger BionicMotionRobot project.
You can see the hand in action, in the video below.
Source: Festo





