
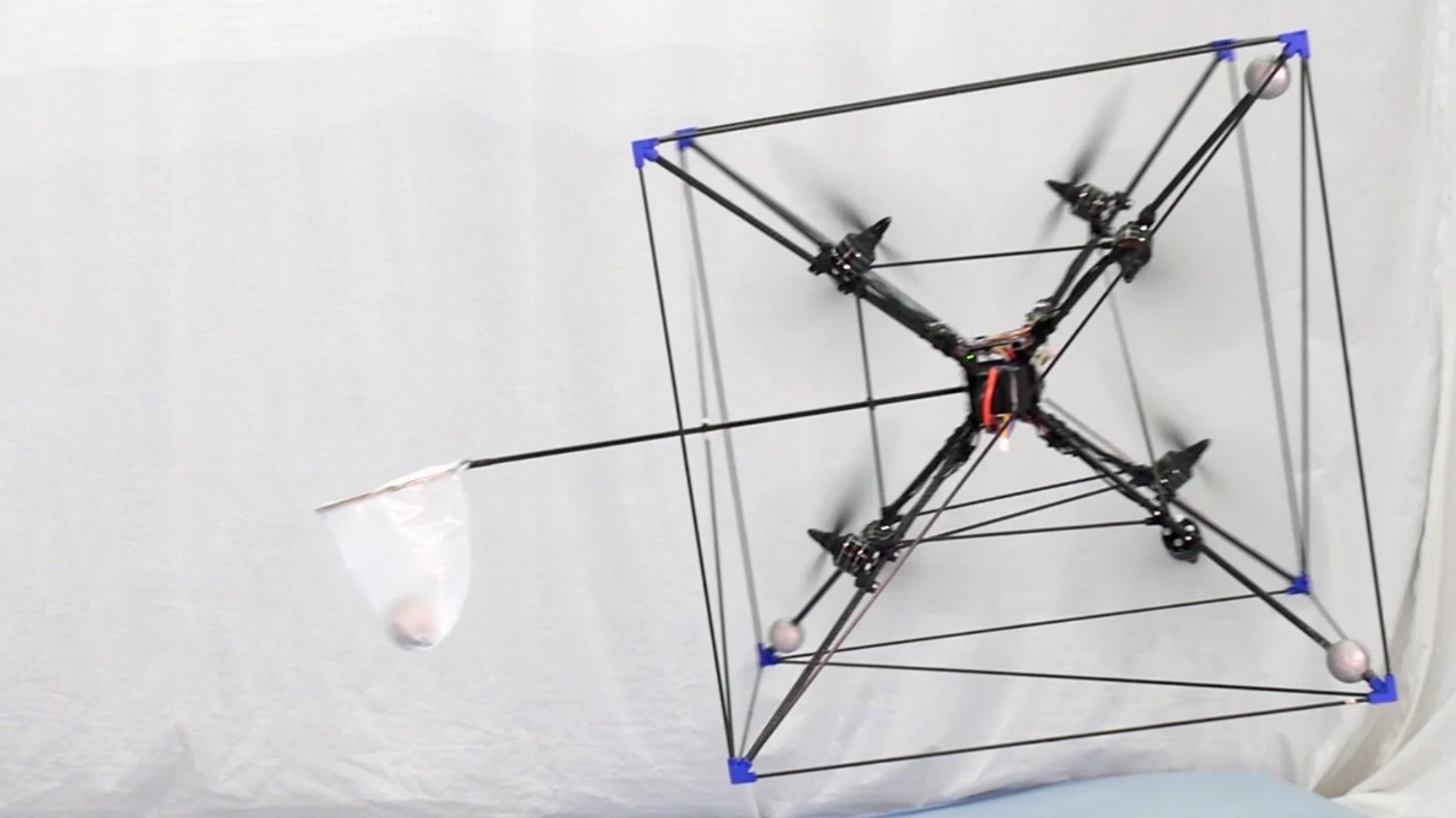
Conventional multirotor drones, be they quad-, hexa-, octo- (or even 18-rotor) copters, have all their rotors positioned on the same horizontal plane. Although they're still remarkably agile, this mechanical simplicity limits the drones' thrust vector to one direction. This new octocopter design positions the rotors at different angles and allows the drone to independently control its thrust in three dimensions, giving it the ability to fly in any orientation. To demonstrate the potential of the design, a prototype has shown off its catching ability.
Researchers Dario Brescianini and Raffaello D'Andrea, who developed the "Fetching Omnicopter" at the Institute for Dynamic Systems and Control at ETH Zurich, point out that drones have already proved their worth in surveillance, inspection, mapping and search and rescue applications. In a logical progression, research is now underway into applications in which drones would physically interact with their environment, such as manipulating objects or assembling structures. The ability to fly in any orientation and independently control their position and attitude would be an obvious advantage in such applications, so the team developed a vehicle that could do just that.
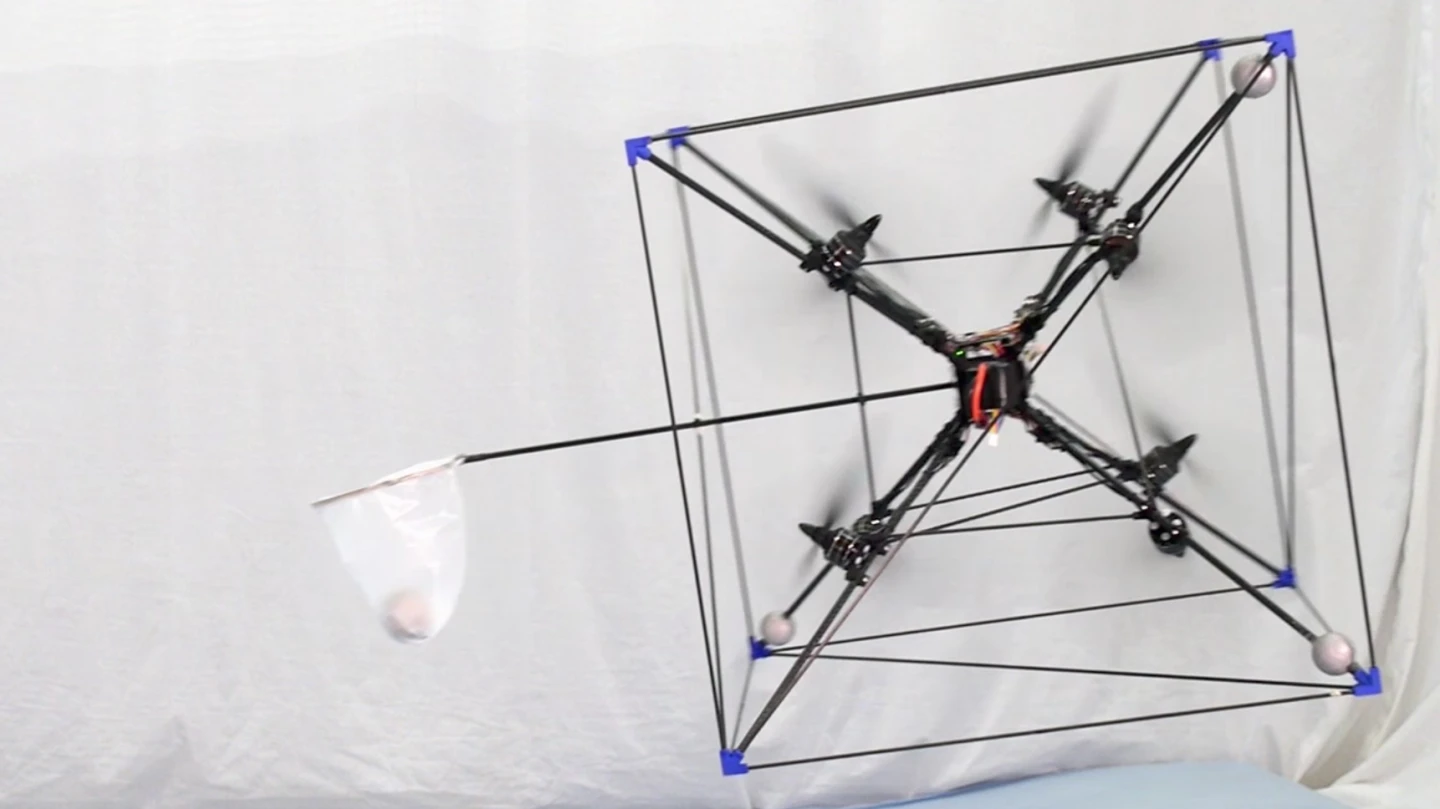
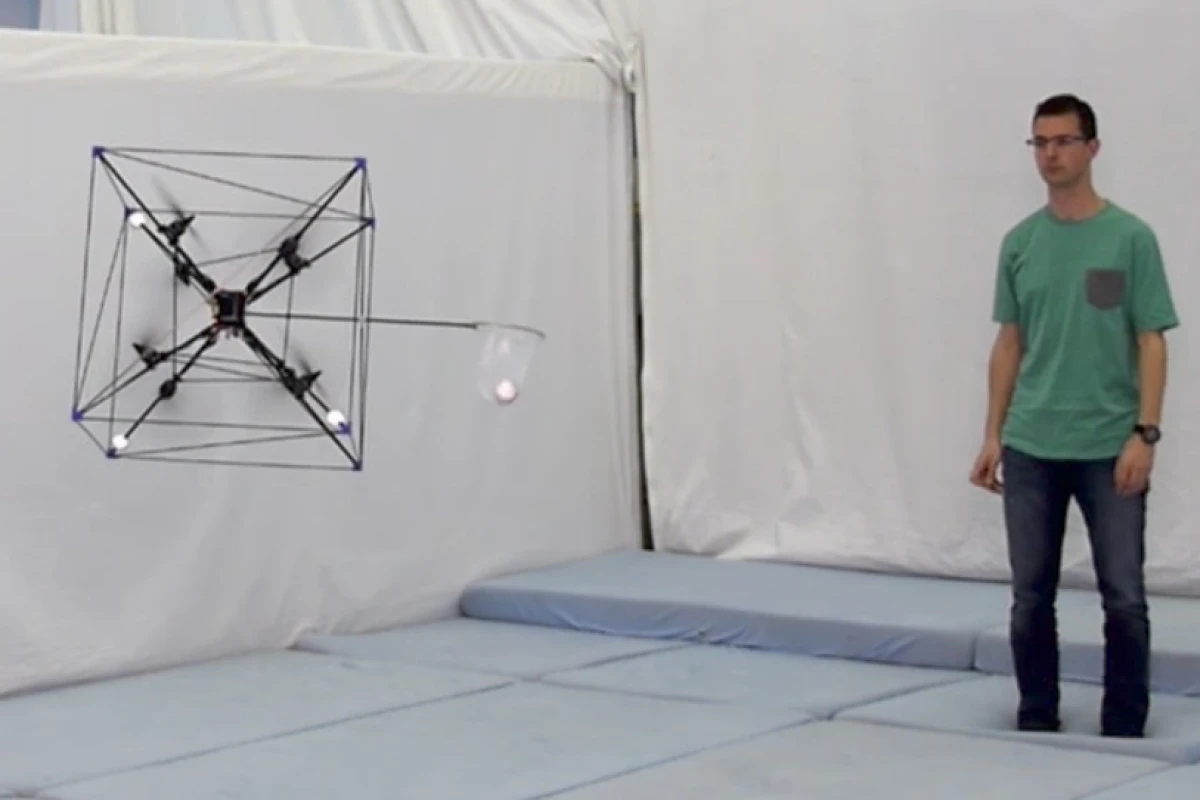
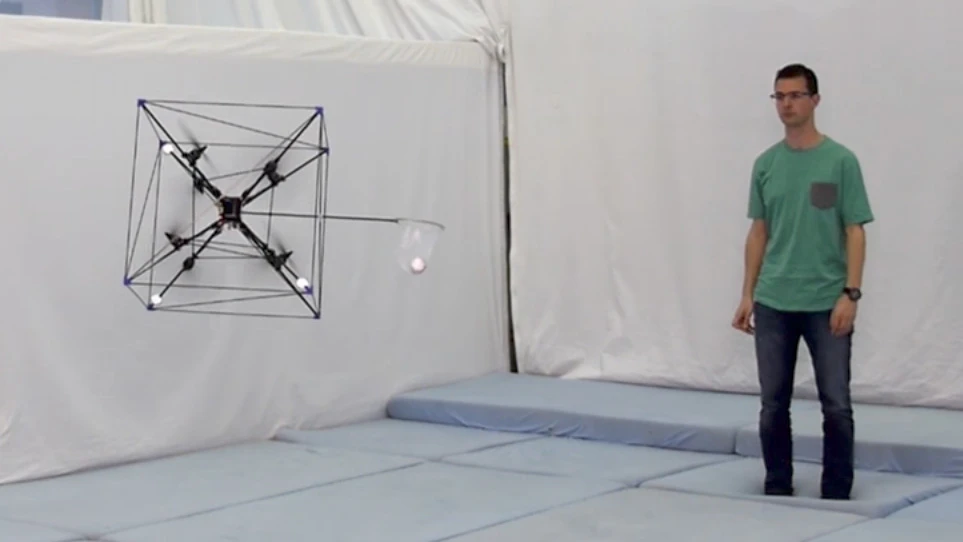
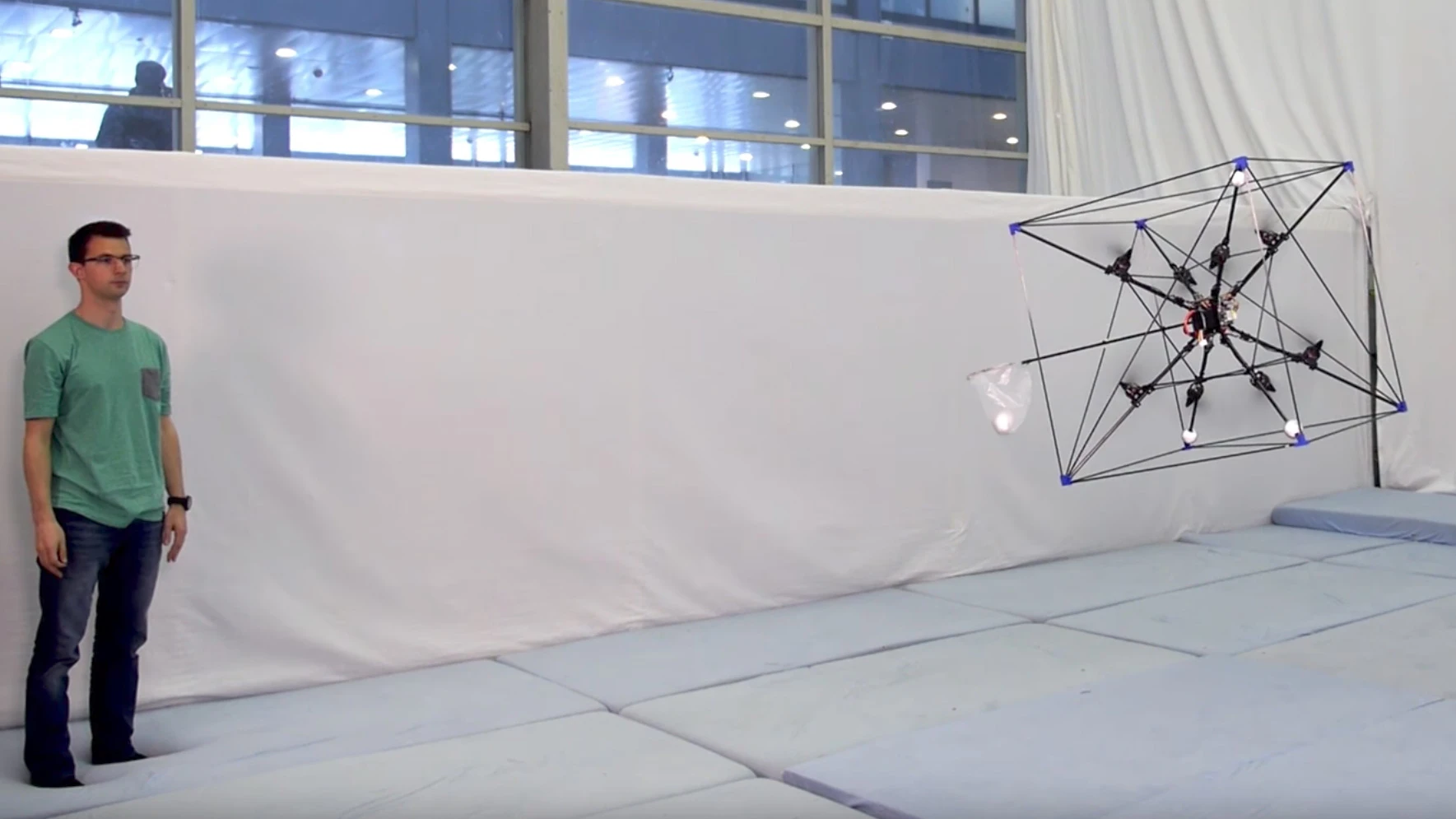
The unique rotor layout required the development of a trajectory generator algorithm for precise control of the drone that is computationally efficient. The algorithm the team created is able to generate around 500,000 trajectories per second that guide the drone from its initial position to the desired end position in a given timeframe. To demonstrate the capabilities of the system, they attached an arm with a small net at the end to the drone and played a game of catch.
The impressive results can be seen in the video below, with the algorithm predicting the trajectory of the ball as soon as it leaves the thrower's hand. It then calculates various paths that can be taken to catch the ball in the net and selects the smoothest one, which the drone follows, all in just 20 milliseconds.
The team's paper on the Fetching Omnicopter was presented at IEEE International Conference on Robotics and Automation (ICRA) last year.
Source: YouTube





