





Researchers at Stanford University have developed a small "aircraft" that resembles a flying fish which can jump and glide over a greater distance than an equivalent jumping robot. Using a carbon fiber spring to take off, the jumpglider has a pivoting wing that stays out of the way during ascent, but which locks into place to glide farther on the way down.
Like flying snakes, squirrels and fish, the gliding aces of the Animal Kingdom, the ability to glide affords the machine certain advantages over its "ballistic jumping" peers. A gliding robot (and we use the term robot loosely, as the jumpglider is not an autonomous sensing machine) can travel a greater distance, land more gently, and, if necessary, adjust its launch angle without greatly compromising distance. A slippery launch surface favors a steeper jump, for example.
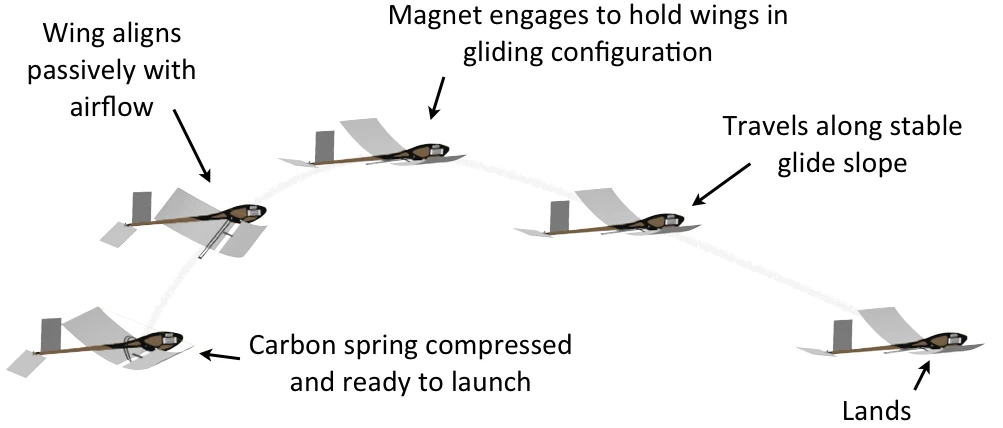
The challenge during take-off and ascent is to reduce drag as much as possible. Jumpglider's wing is free to pivot on the way up so that it naturally aligns with the direction of travel. At peak altitude, the wing locks into place using simple magnets on the wing and the body.
The researchers used typical airspeeds resulting from a jump launch to optimize wing design to maximize the ratio of lift to drag. The team arrived at a 70-cm (28-inch) wing for the 30-g (1-oz) prototype. Weight has been kept to a minimum by using balsa wood for the frame and a carbon fiber and ProFormance foam wing.
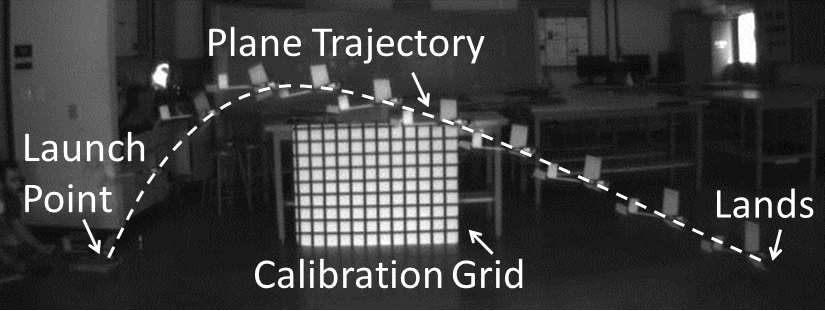
Analyzing the jumpglider's performance with a high-speed camera, the researchers found that though the jumpglider cannot jump as high as a simple ballistic jumper of the same weight using the same energy due to having some drag inherent in the design, it was able to jump farther horizontally thanks to its gliding descent. The gains made varied with the launch angle, traveling 40 percent farther at 58º and 20 percent farther at 45º. However, as researcher Alexis Lussier-Desbiens highlights to Gizmag, "the optimum jump angle of a ballistic jumper […] is fixed at 45º, which means that significant amount of friction is required to achieve that maximum theoretical jumping distance." The jumpglider is not so restricted.
Despite reports to the contrary, Lussier-Desbiens emphasizes the jumpglider's lack of autonomy. "Currently, the spring is manually loaded and the robot can't reload its spring by itself," he tells Gizmag. "This is something we will work on in the future, but demonstrating autonomous operations wasn't the focus of this work as many researchers have already demonstrated that on other jumping robots." Similarly, the prototype is not currently equipped with solar technology.
You can see the jumpglider in action in the video below.
Source: Biomimetics & Dextrous Manipulation Laboratory, Stanford University, Efficient Jumpgliding: Theory and Design Considerations (PDF)





