





When firefighters need to enter smoke-filled buildings to conduct search or rescue, they frequently suffer from low visibility and often need to feel their way along walls or follow ropes reeled out by the lead firefighter. With a limited supply of oxygen carried by each firefighter, being slowed by the inability to see can severely limit their capacity to carry out duties in these environments. Now researchers from King’s College London and Sheffield Hallam University have developed a prototype robot assistant for firefighters that can help guide them through even the thickest smoke.
Rather than an independent robot firefighter in itself, this device is instead intended to act somewhat like a guide dog where it leads a firefighter into a rescue area, with the firefighter following on behind holding onto the robot's "reins." According to the researchers, this allows the firefighter to move rapidly through hazardous, low-visibility conditions, as vibrations transmitted through the reins alert the user about the size and shape of any obstacle in its path.
Apparently it can even provide other information about encountered objects, such as their pliability or stiffness, which may also help the user locate unseen unconscious people.
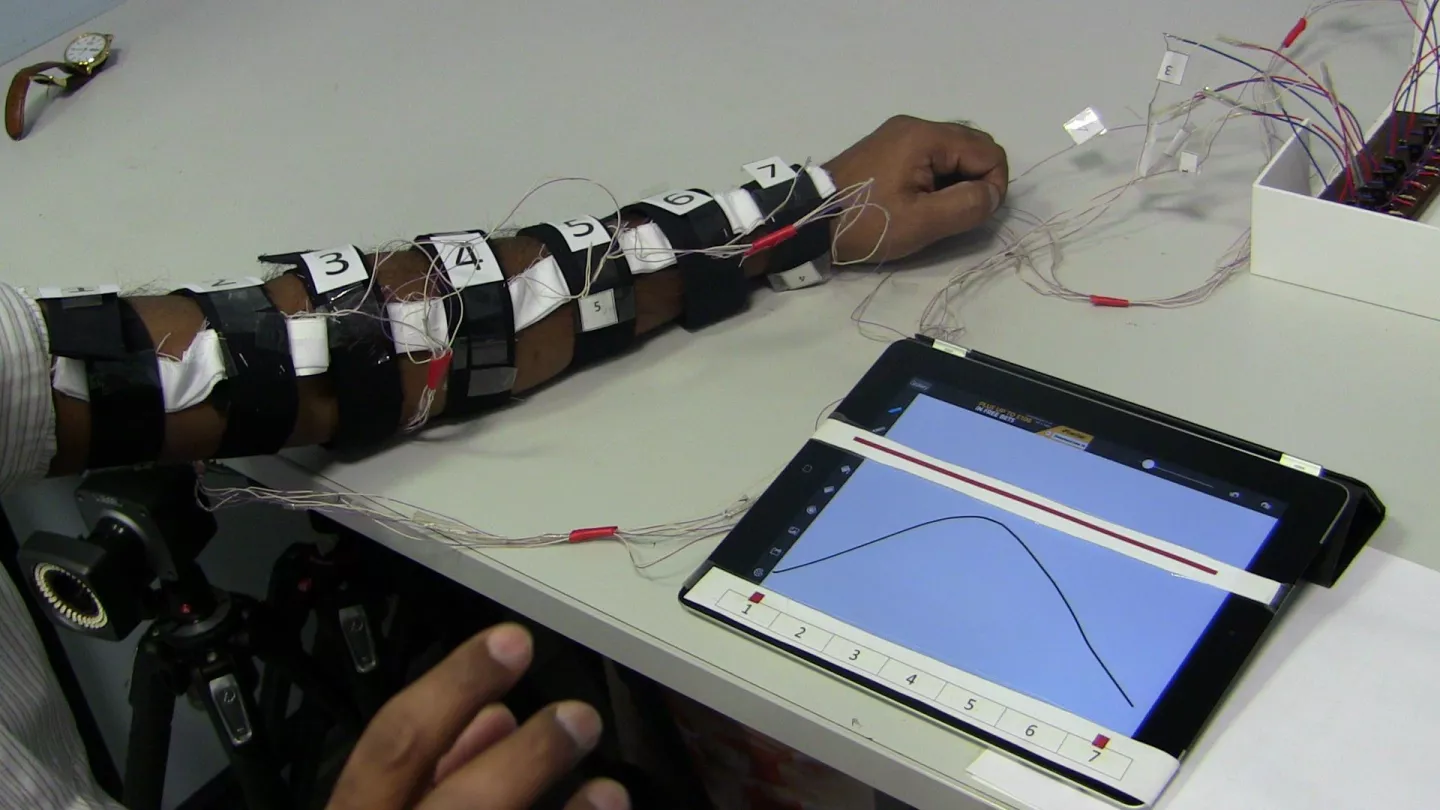
Equipped with tactile sensors, the new guiding robot is designed to provide haptic feedback to the user being guided that indicates various types of objects. In a real-world situation, according to the researchers, the firefighter would don a special sleeve that incorporates electronic micro-vibrators along its length. Enclosing the whole arm, the sleeve is designed to provide feedback that the firefighter would have been trained to interpret from the signals sent back by the robot.
The team claims that the robot guider prototype is designed to respond to any change in the firefighter's reactions too, such as if there is hesitation or resistance to forward movement. When this occurs, the guiding robot slows down to match the pace of its user.
The robot is also designed to preempt or predict the user's actions based on an interpretation of their movements as well as a catalog of their previous actions. According to the researchers, this process is controllable via an algorithm they have created that could determine the firefighter's degree of trust in the machine, so that it can tailor its interactions accordingly.
"We’ve made important advances in understanding robot-human interactions and applied these to a classic life-or-death emergency scenario where literally every second counts. Robots on reins could add an invaluable extra dimension to firefighting capabilities," said Dr. Thrishantha Nanayakkara of King’s College London.
The tactile language being developed by the team is also being considered for use by robotics in a range of domestic settings, and the researchers now intend to further investigate how reins and haptic controls may help the elderly be more independent in their own homes.
Before such advanced uses come to pass, however, the team must first prove its device in more real-world scenarios.

So far the guiding robot has been tested in smoke-filled caves in Germany, going past objects and potential hazards while guiding blindfolded test subjects around. Now that a proof-of-concept has been completed, the team plans to build a full working prototype for testing in real-world firefighting conditions.
"With the use of robots in emergency situations still in its relative infancy, it is crucial to develop an understanding of how robotics interact with people and how those communications can be explored," said senior designer Heath Reed of Sheffield Hallam University.
With project partners that have included the Guide Dogs charity, South Yorkshire Fire & Rescue Service, and Thales Ltd, the team is hopeful of continued research and eventual applications that improve the haptic feedback system and its use in interactions between robot assistance and humans.
"This project paves the way for robotics to be developed in a number of exciting sectors and I would expect the next five years to see some real developments based on our own research," said Jacques Penders from Sheffield Hallam University.
This research has been developed with funding from the Engineering and Physical Sciences Research Council (EPSRC).
Source: EPSRC


