

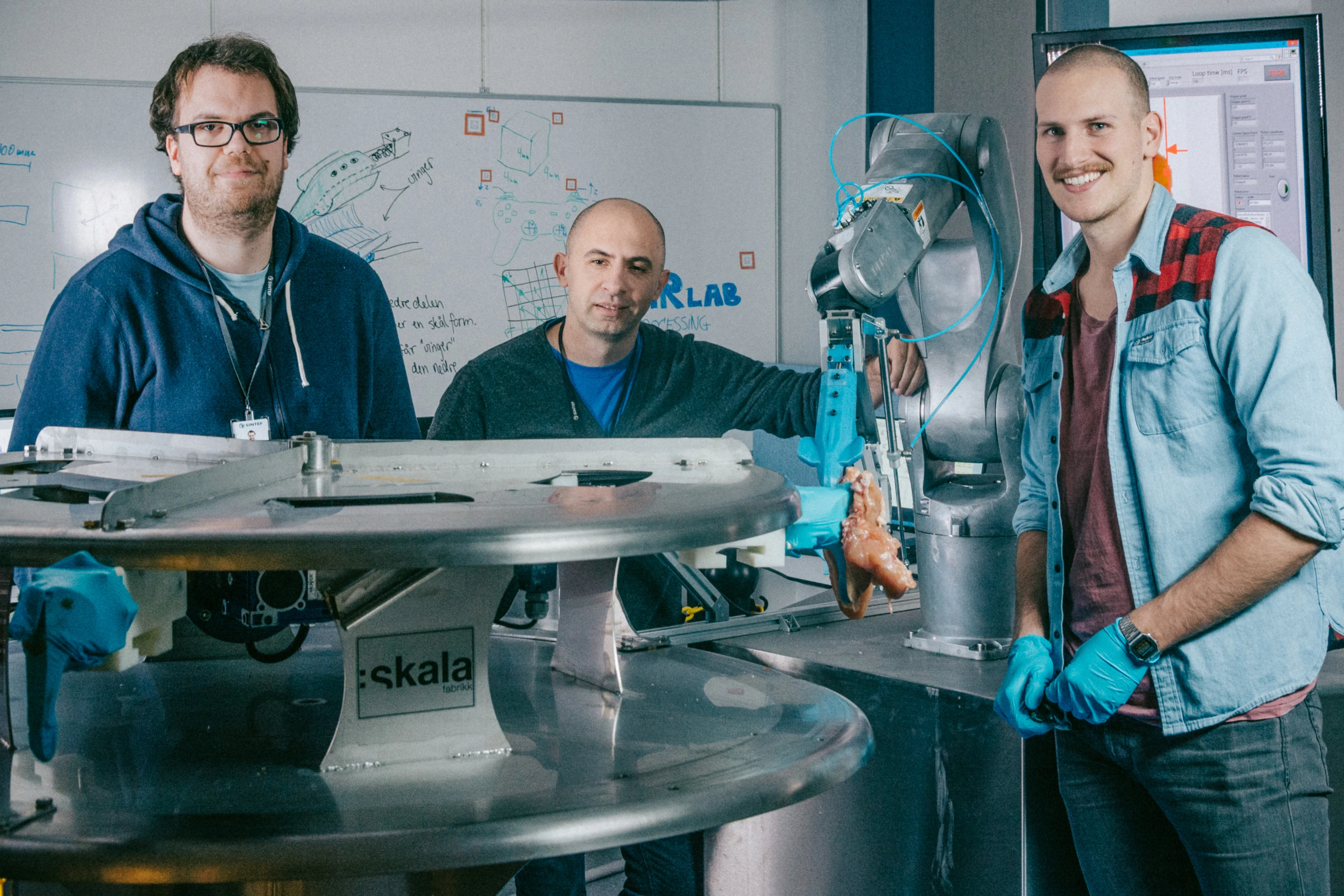
Pulling chicken breasts off the bone can be a fiddly process, and often results in flesh being wasted by getting left behind. In a factory setting, that means slower processing times, and less meat to sell. That's why the Norwegian CYCLE project is developing an industrial robot to do the job.
The current version of the robot was developed by the SINTEF research group, and is named Gribbot – "gribb" is Norwegian for vulture, and the machine is said to resemble a vulture's beak.
It utilizes a Kinect camera for 3D vision, along with a flexible-fingered grasping hand, and an algorithm that guides that hand's movements based on what the camera sees. Challenges lie in the fact that the meat is slippery and hard to hold onto, plus reflections on its shiny surface can make 3D imaging difficult.
Nevertheless, Gribbot is apparently quite adept at grasping chicken carcasses, identifying the breast meat, and then simultaneously scraping and pulling it off the bone. It is hoped that once perfected, the robot "will make Norwegian food production more sustainable, both in terms of profitability and utilization of raw materials."
Impressive as that may be, a team at Georgia Tech has already developed a robot that can debone an entire chicken. For its part, SINTEF has previously created a fish-filleting robot.
Source: SINTEF





