
We've looked at a number of efforts to extend the capabilities of the traditional white cane for the visually impaired, such as using ultrasonic echoes or lasers to give users a better lay of the land. But a group of engineering researchers at the University of Southern California (USC) are looking to do away with the cane altogether and replace it with a "guide vest" that works in conjunction with a helmet-mounted camera and special software to let wearers "see" the world through tactile feedback.
"There are many limitations to canes for the visually impaired, from low hanging branches to large objects," says Gérard Medioni, a professor in the Institute for Robotics and Intelligent Systems at USC Viterbi. "We wanted to build an effective system that would provide new opportunities for the visually impaired."
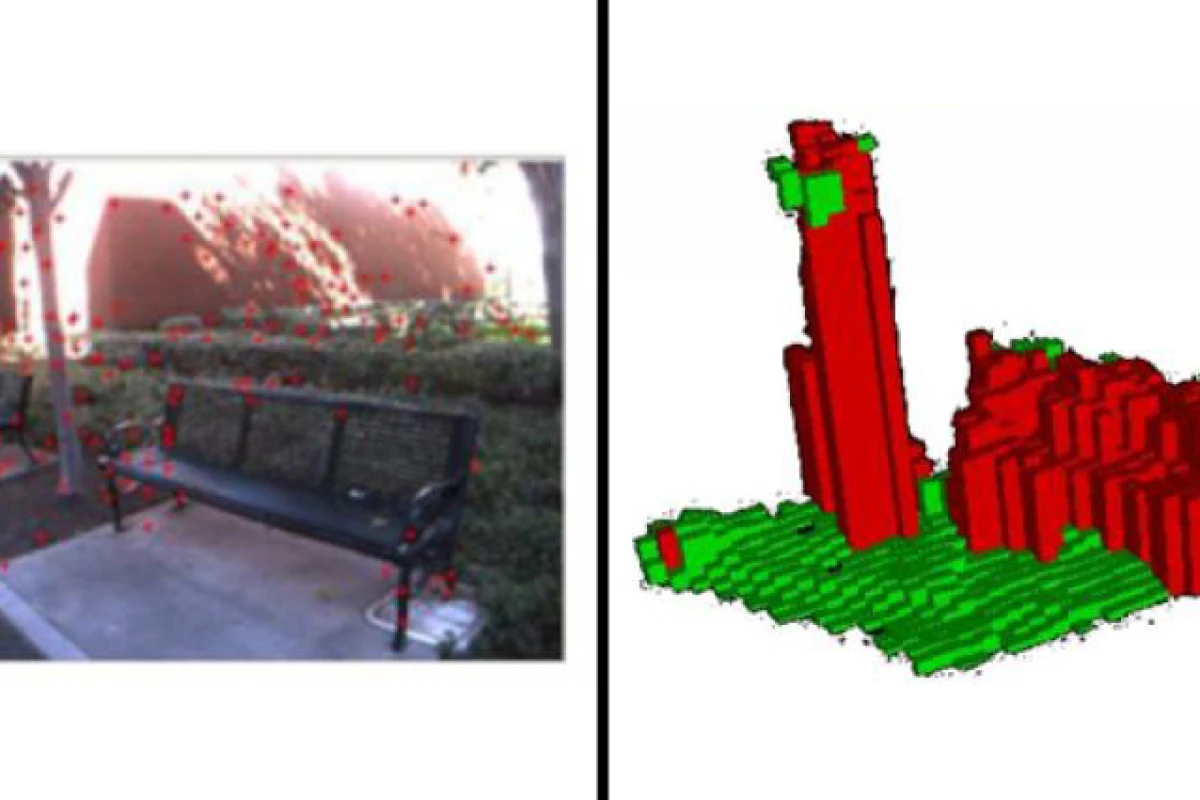
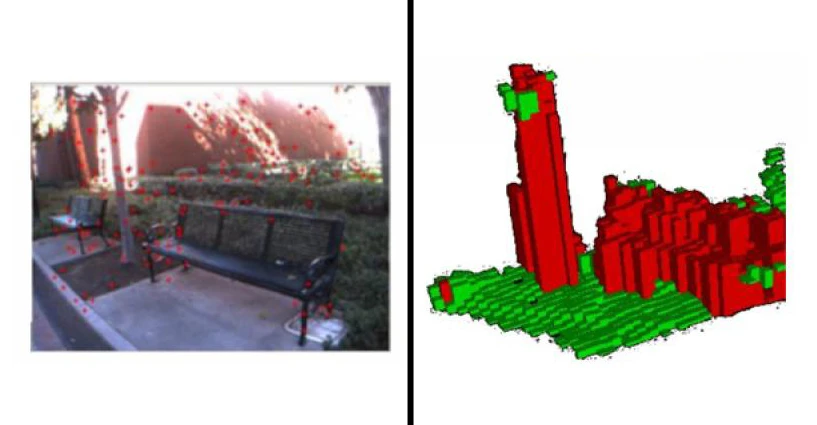
The system developed by Medioni and his colleagues uses a helmet-mounted binocular camera to capture images that are sent wirelessly to a PC where Simultaneous Localization and Mapping (SLAM) software is used to build maps of the environment and identify a safe path through any obstacles. This route information is conveyed to the user through a guide vest that includes four micro motors built into the shoulder and waist.

These motors vibrate to indicate obstacles so the user can navigate safely. For example, a vibration on the left shoulder indicates an object on the upper left, such as a low hanging branch, while a vibration on the right waist will indicate an object on the lower right, such as a trashcan. This enables the user to avoid obstacles by negotiating a vibration-free path.
The USC team tested the prototype system on visually impaired subjects at the Braille Institute and received positive feedback. They are now looking to replace the current bulky, helmet-mounted camera with a micro-camera system that could possibly be attached to glasses. The team is aiming to have a new system in place by the end of 2011.
The USC research was funded by the National Science Foundation and the U.S. Army, with the aim of helping veterans who have been blinded during their military service. The W.M. Keck Foundation also contributed funding to the research.



