
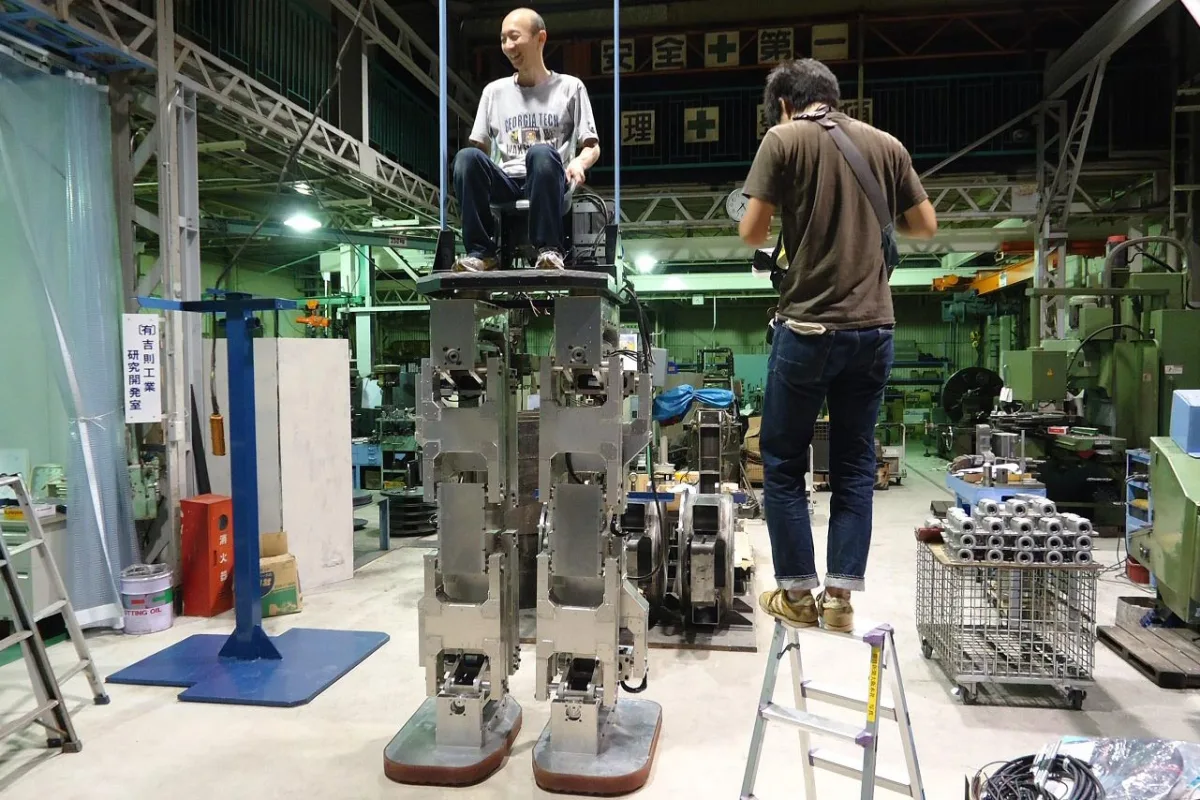
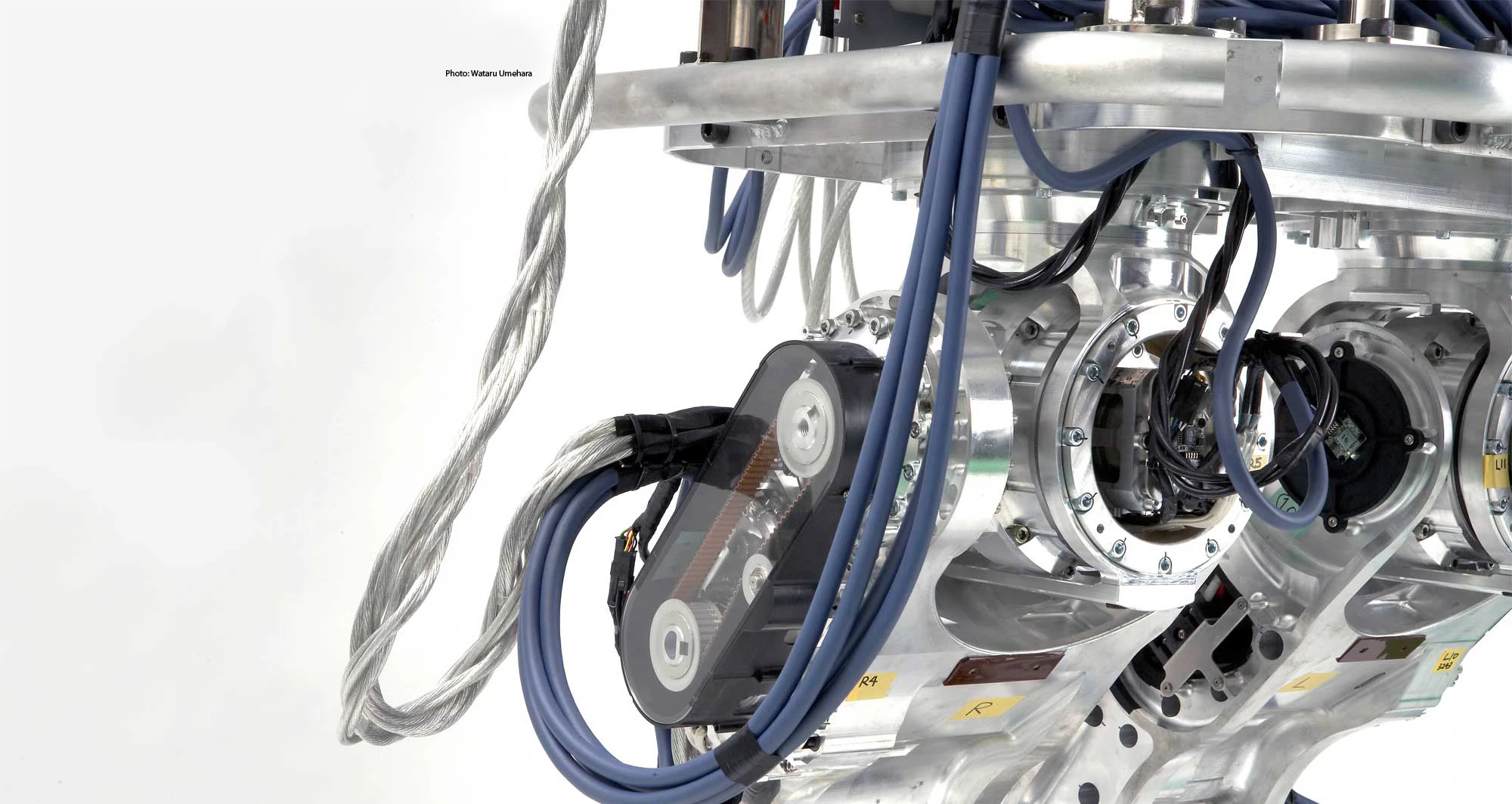
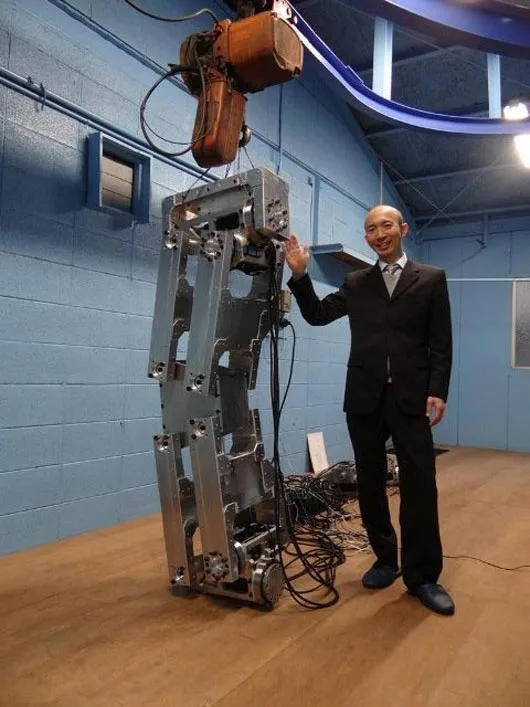





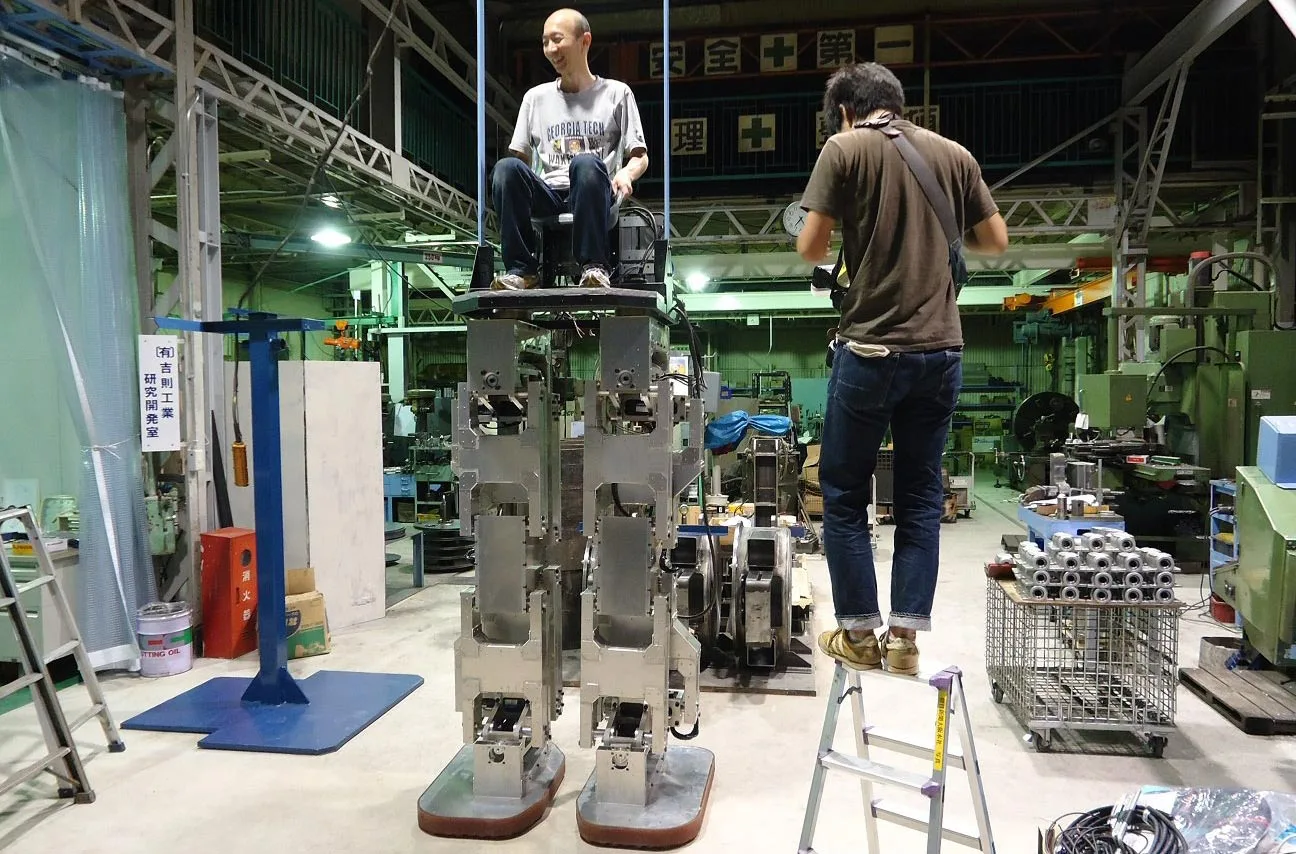





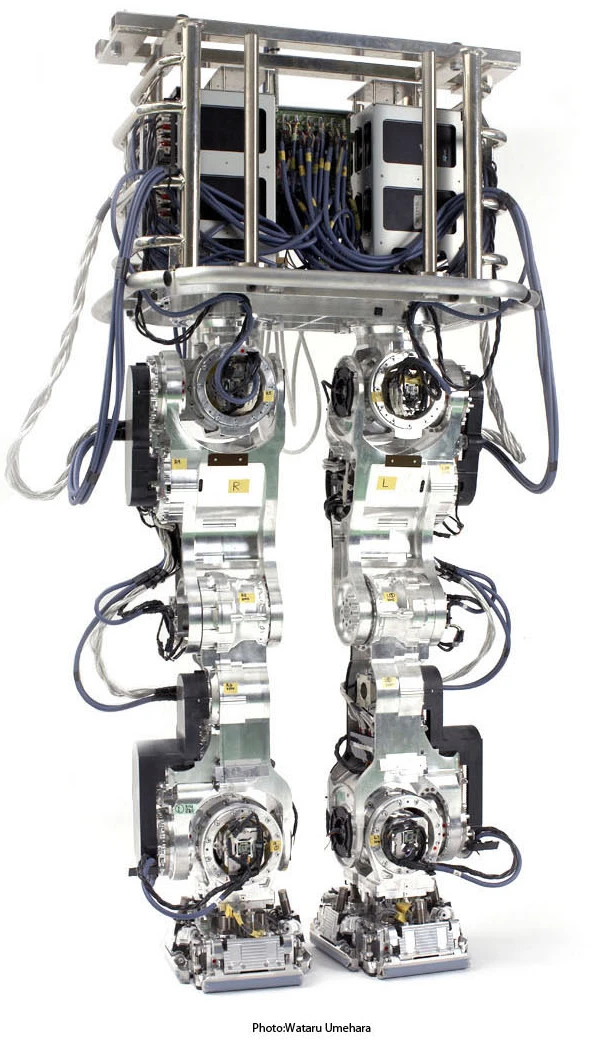
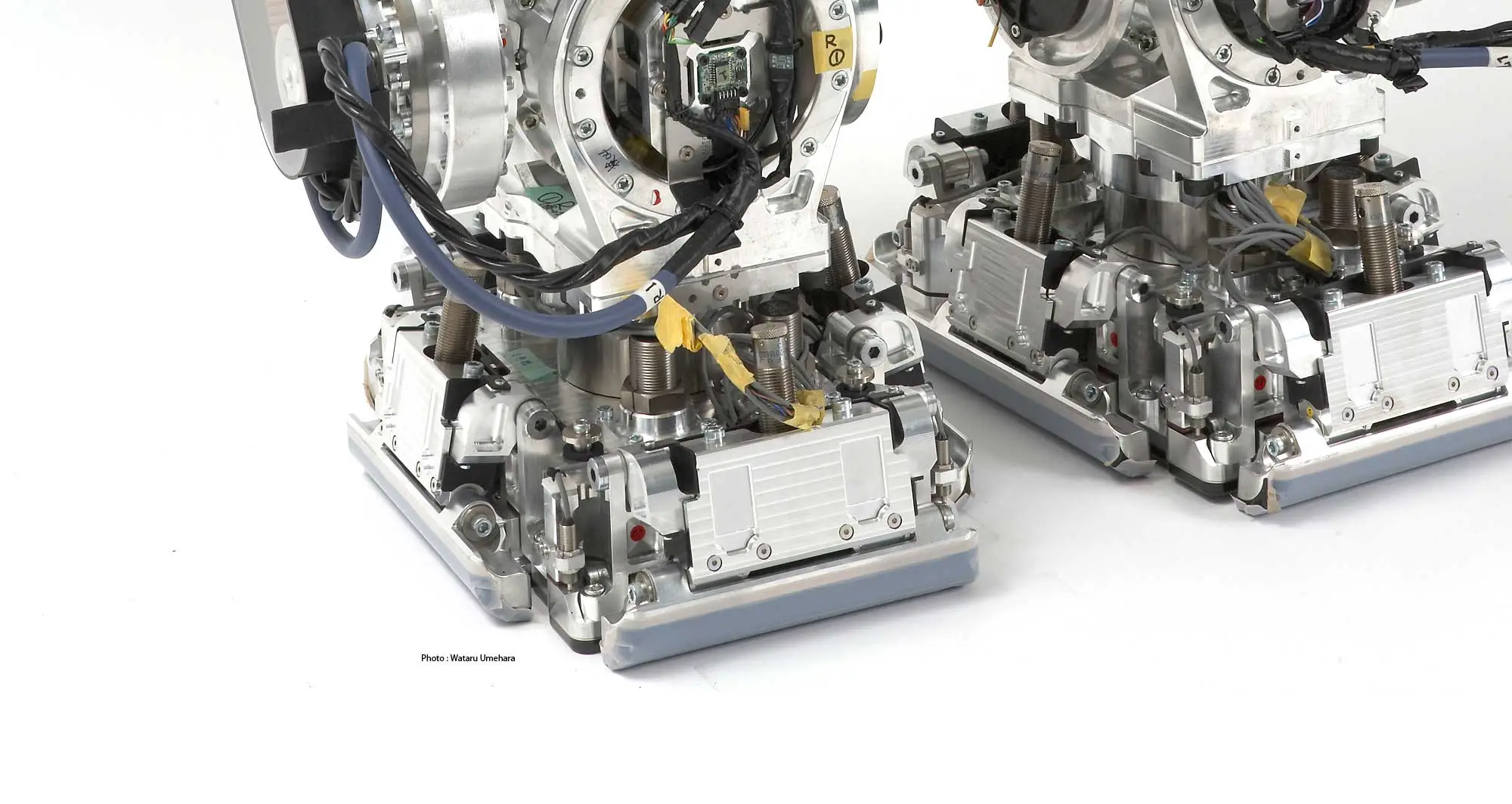
Have you ever dreamed of what it would be like to pilot a giant robot? If you have, you're not alone. A roboticist by the name of Hajime Sakamoto dreams of building his very own Gundam mobile suit, and he's making progress on a real 4 meter (13 feet) tall bipedal robot that can carry him around. So far the legs have been completed, and you can watch them stand up and take a few steps in the video below.
Unlike the Kuratas, which was built by an iron working artist and moves on wheels, Sakamoto's robot is the real McCoy. His company, the Hajime Research Institute, has been building humanoid robots for the better part of a decade, in various sizes, which have competed in RoboCup soccer matches over the years. In 2009 he built a 210 cm (7 feet) tall humanoid robot, which was controlled with a standard game pad, but apparently that wasn't big enough.
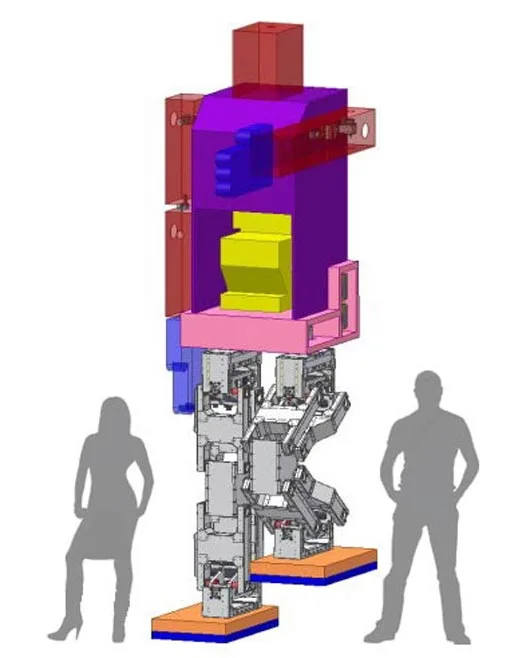
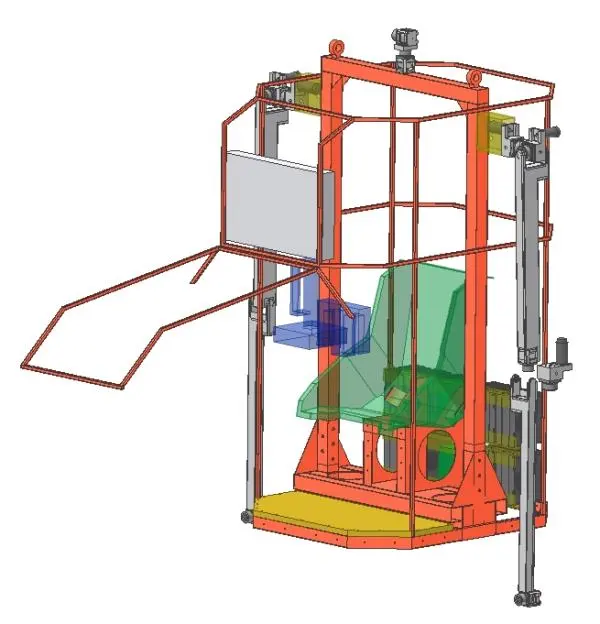
His ambitious 4 meter (13 feet) tall robot will eventually be outfitted with an upper body, if he can secure the necessary funding. The torso will act as the cockpit, and its two arms will be controlled by moving a pair of miniature arms attached to the front of the pilot's vest. The plan is to gradually build bigger and bigger robots, culminating with one that matches the specs of the Gundam mobile suits – like the statue erected in Japan a couple years ago, but with working parts.
If you tilt your head to the side, you can see it taking a few steps in this video, piloted by Hajime Sakamoto himself:
The rise of bipedal robot vehicles
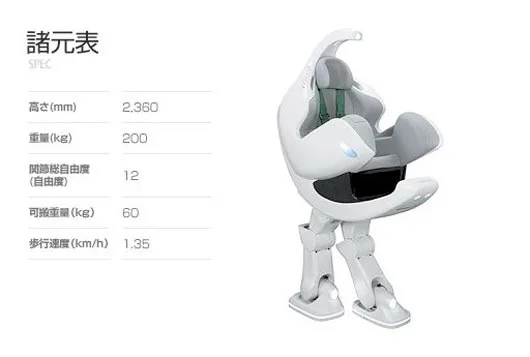
Toyota i-foot
While we may not see them on every street corner just yet, bipedal robot vehicles have been in development for many years. In 2003 Toyota began working on a prototype walking robot vehicle that would be officially unveiled as the i-foot in December 2004. Passengers would sit comfortably inside its egg-shaped body, which would protect them on all sides should the robot fall over. When walking next to a person, the robot could lower its stance to match their eye line.
It stood 236 cm (7 feet 6 inches) tall, weighed 200 kg (440 pounds), and walked with inverted knees. It was able to carry a passenger weighing up to 60 kg (132 pounds) at a speed of 1.35 km/h (0.8 mph), and could even ascend and descend stairs. It made an appearance at Toyota's pavilion during the Aichi Expo of 2005 alongside the company's Partner Robot band.
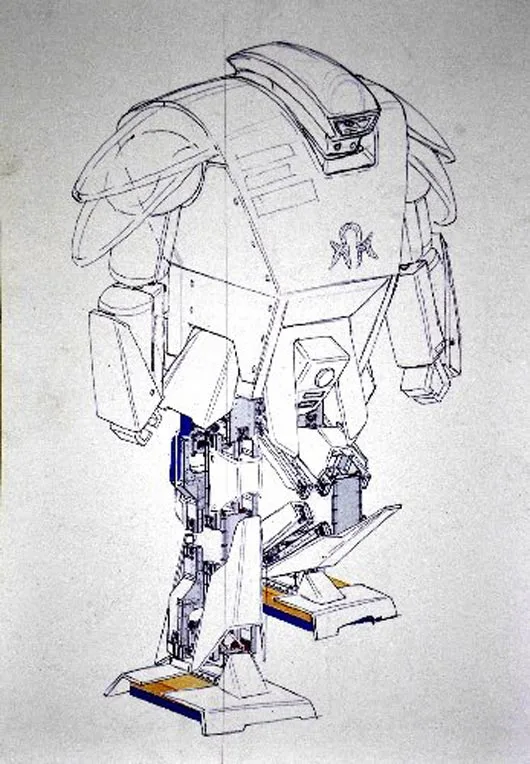
KAIST Hubo Lab HUBO FX-1
In 2006 researchers at the KAIST Hubo Lab created a walking robot chair called the HUBO FX-1. It stood 2 meters (6 feet 6 inches) tall and weighed 150 kg (330 pounds) and had a carrying capacity of 100 kg (220 pounds). It was controlled with a joystick in the arm of the chair, and could walk forward, backward, turn left and right, and walk from side to side.
fuRo Core
In 2009 another large bipedal vehicle was unveiled by researchers at fuRo (a division of the Chiba Institute of Technology). Core stands 2 meters (6 feet 6 inches) tall and weighs 230 kg (507 pounds), and is able to carry up to 100 kg (220 pounds). The legs feature specially developed shock absorbers that reduce vibrations from ground impacts by 80 percent. The team also developed their own set of super-sized brushless motors specifically for the robot.
Source: Hajime Robot and Facebook page via YouTube





