







What good is a robot if, when left to its own devices, it breaks down at the first sign of trouble? What if that robot has been sent off to some inhospitable place where rescue is impossible, much less repair. Robots on the cutting edge are expensive things, so the ability to self-repair could be extremely valuable. But if it can't self-repair, the ability to simply make do would be rather useful too. That's the thinking behind this hexapod robot which can work out how best to adjust its gait in the unfortunate event that it loses a leg.
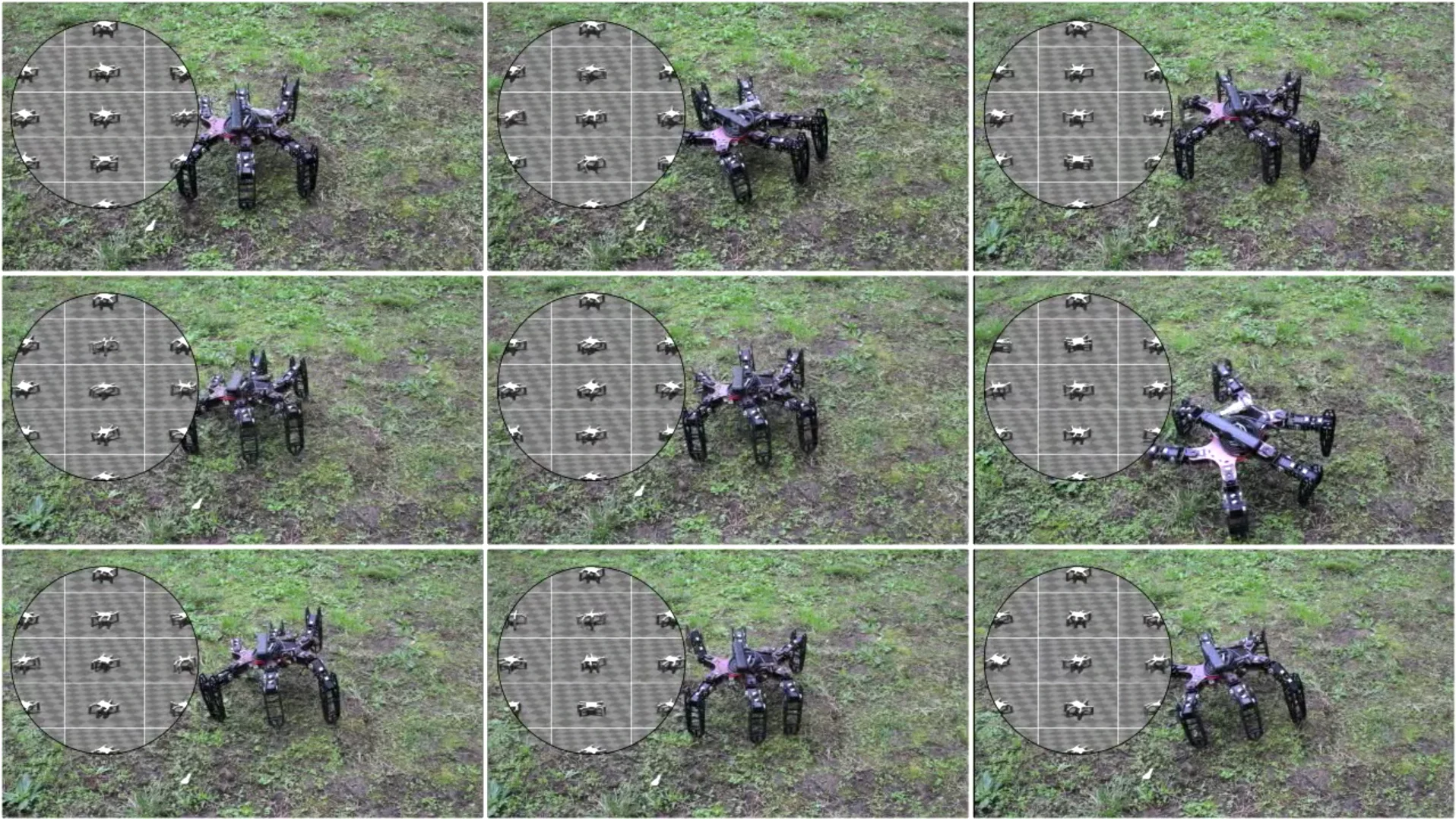
Developed by roboticists at the Pierre-and-Marie-Curie University, the hexapod uses what the team calls a T-resilience (the T standing for Transferability-based) algorithm. With six legs, the hexapod tootles along quite happily at 26 cm/s. But cut one of its front legs in half and, attempting to walk with the same gait, it manages only 8 cm/s. But after running 20 minutes' worth of simulations and tests, the robot has worked out a new way of walking, and is able to cover 18 cm/s, more than twice its initial post-damage speed.
Essential to this approach is that the robot is fore-armed with what the researchers refer to as a self-model, which is basically an understanding of its ideal undamaged anatomy. Previous thinking on the issue had it that it's necessary for the robot to analyze its new gait to diagnose the damage and compensate accordingly. But the team argues that the robot can arrive at a working answer more quickly by simply generating a number of possible alternative gaits based on an undamaged state, testing them, and then comparing the theory with the reality.
The robot spends 20 minutes testing 25 alternatives, during which a ranging camera feeds data to a separate algorithm which works out the distance traveled. In this way the robot is able to compare its actual performance with its theoretical performance, finally settling for the closest match: a gait which recovers much of the lost speed.
The team has written up its findings in the self-published paper, Fast Damage Recovery in Robotics with the T-Resilience Algorithm. You can see the by-now-obligatory video of the hexapod hexapodding and pentapodding below.
Source: Pierre-and-Marie-Curie University via IEEE Spectrum





