



Honda has ramped up it self-driving car efforts this week, publicly setting its sights on achieving Level 4 autonomy by 2025. This would see the company's cars handle all driving tasks without human intervention, and according to Honda, complete a critical step in its contribution toward a future of accident-free roads.
Honda had previously announced plans to introduce Level 3 autonomy by the year 2020, which would mean highly-automated freeway driving. The new announcement takes things one step further and is yet another sign of how quickly these technologies and the industry as a whole is advancing.
This idea of autonomy levels first emerged in 2014 by way of a report from the international Society of Automotive Engineers (SAE). By categorizing the varying capabilities of this new breed of vehicle, it would provide a framework and a language developers and the general public could refer to as we progress along the road toward full autonomy.
Full autonomy is described as Level 5, where the steering wheel is optional and the seats might face even face backwards to form a mobile lounge room in your car. Level 4, which Honda has in its cross hairs, would mean a car that can be driven by a human, but doesn't ever need to be. It will call out for human assistance if needed, say if it encounters rough weather or unusual conditions, but by and large this constitutes a true self-driving car. Daimler and Waymo are two other examples of companies targeting Level 4 autonomy.
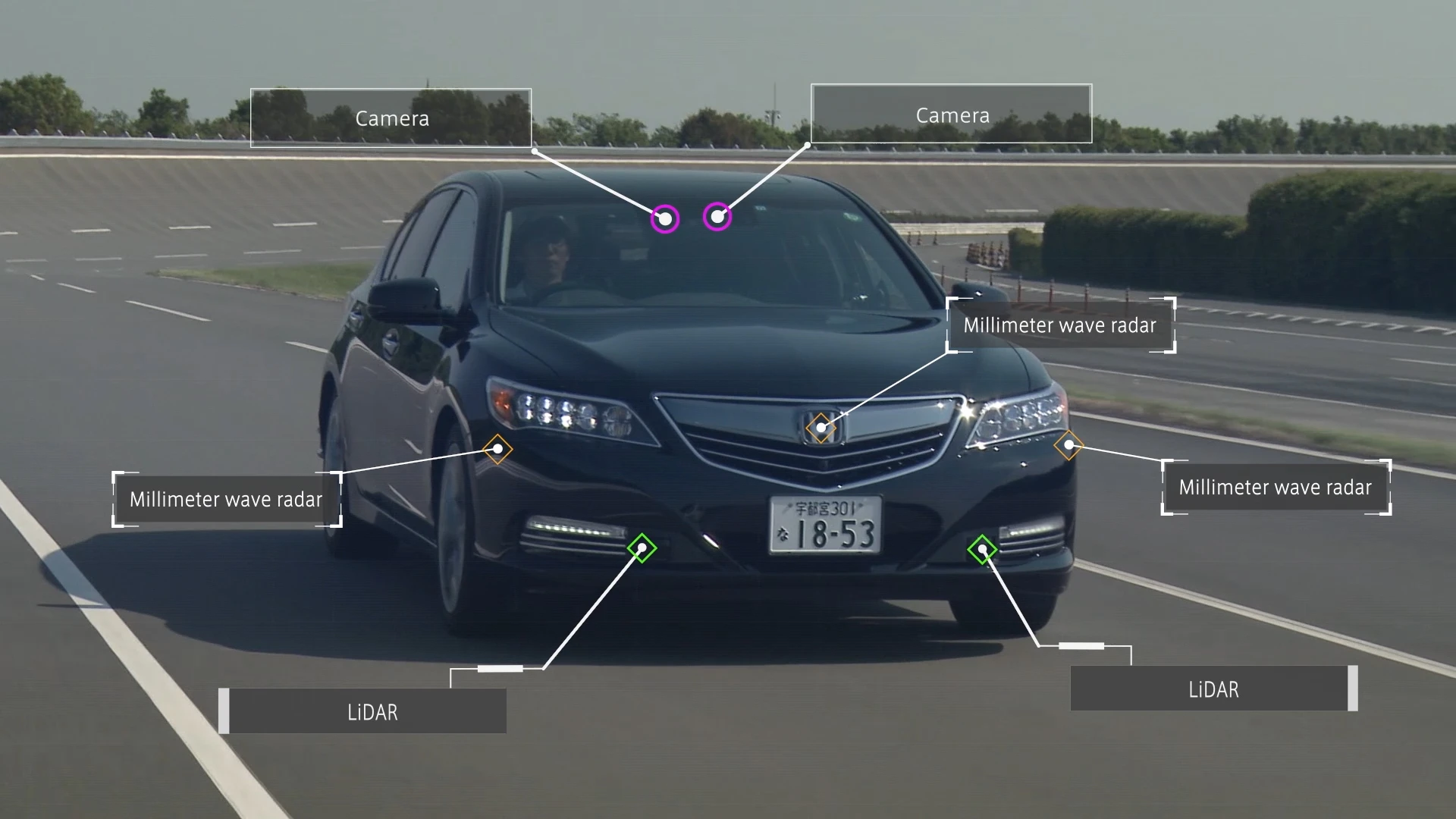
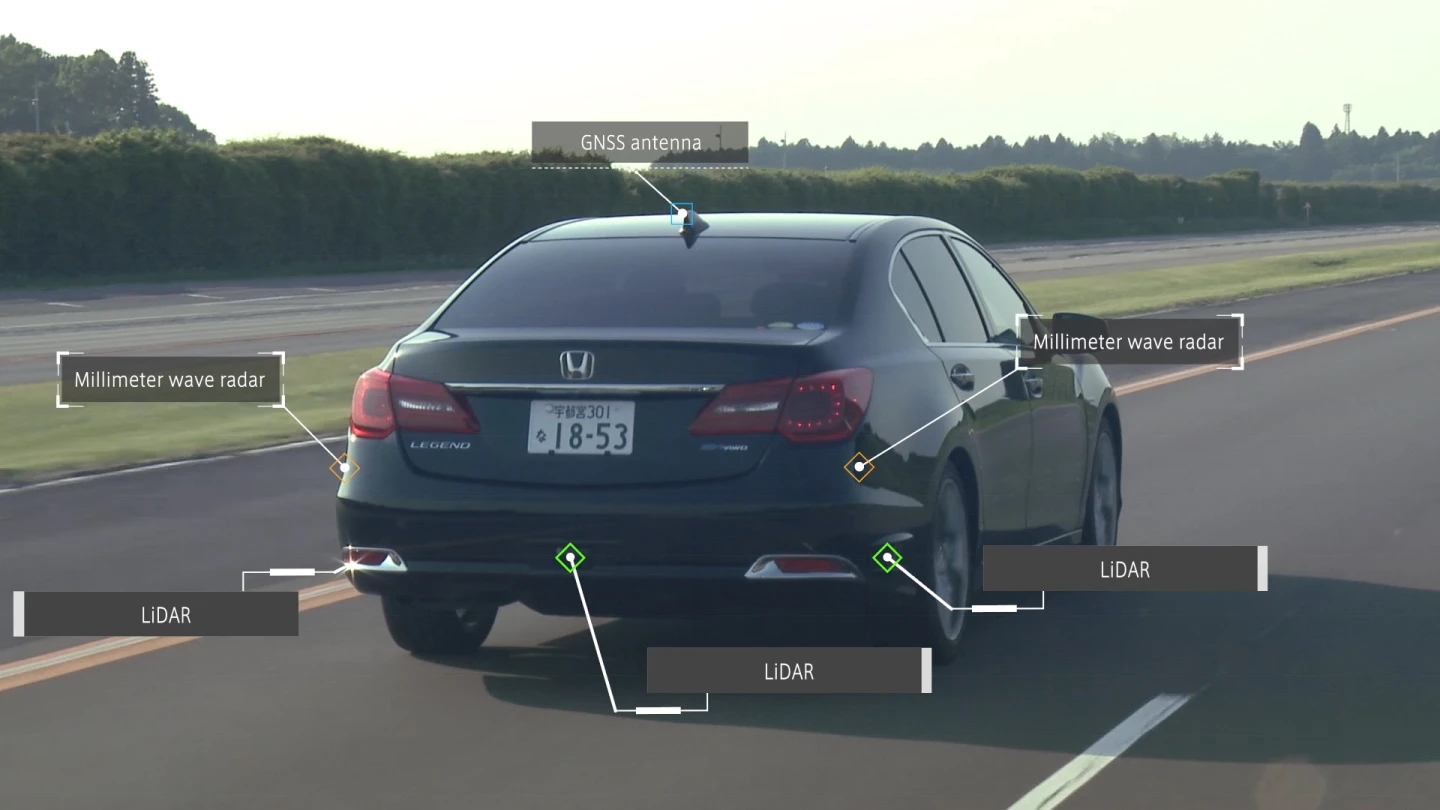
Honda demonstrated its progress this week in Japan with media on-hand, where a driving test saw a vehicle equipped with radar sensors, LIDAR and multiple cameras navigate a closed track simulating multi-lane freeway traffic. Another test saw an autonomous vehicle use AI and cameras, with no GPS or LIDAR, navigate a complex urban environment and predict and avoid obstacles.
You can see these tests playing out in the video below.
Source: Honda





