




Robots may build cars by the millions, but they still don't have much to do with assembling airliners – a task where human workers are still essential. To give the organics a helping manipulator, the Joint Robotics Laboratory (JRL) and Airbus Group have embarked on a four-year joint research project to develop humanoid robots that can work on aircraft assembly lines and free workers from tedious and hazardous jobs.
Most airliners are technically built on an assembly line, but the process lacks the economy of scale needed to employ most assembly line techniques, such as robots. This is because airliners are among the most advanced and complicated pieces of engineering on the planet and fewer units are made in an entire production run than a car factory cranks out in a single day.
This is part of the reason aircraft assembly isn't suitable for fixed-base robots or even ones with limited mobility, such as ones mounted on tracks or wheels. Another is that the interior of an airliner is very large and complex with many tight spaces, The latter is so common that assembly and maintenance manuals include detailed, illustrated instructions on how to crawl in to reach certain parts of the aircraft and companies even recruit workers of a particular size to fit inside tight places like the wings. Not surprisingly, this doesn't really lend itself to the approach of tailoring the job to the robot.
Like the VALERI project, JRL, which is a partnership between the National Institute of Advanced Industrial Science and Technology (AIST, Japan) and the French National Center for Scientific Research (CNRS), is working to develop robots capable of working alongside humans in a very robot-unfriendly environment and take on the laborious and dangerous jobs, while freeing up workers for higher-level tasks.
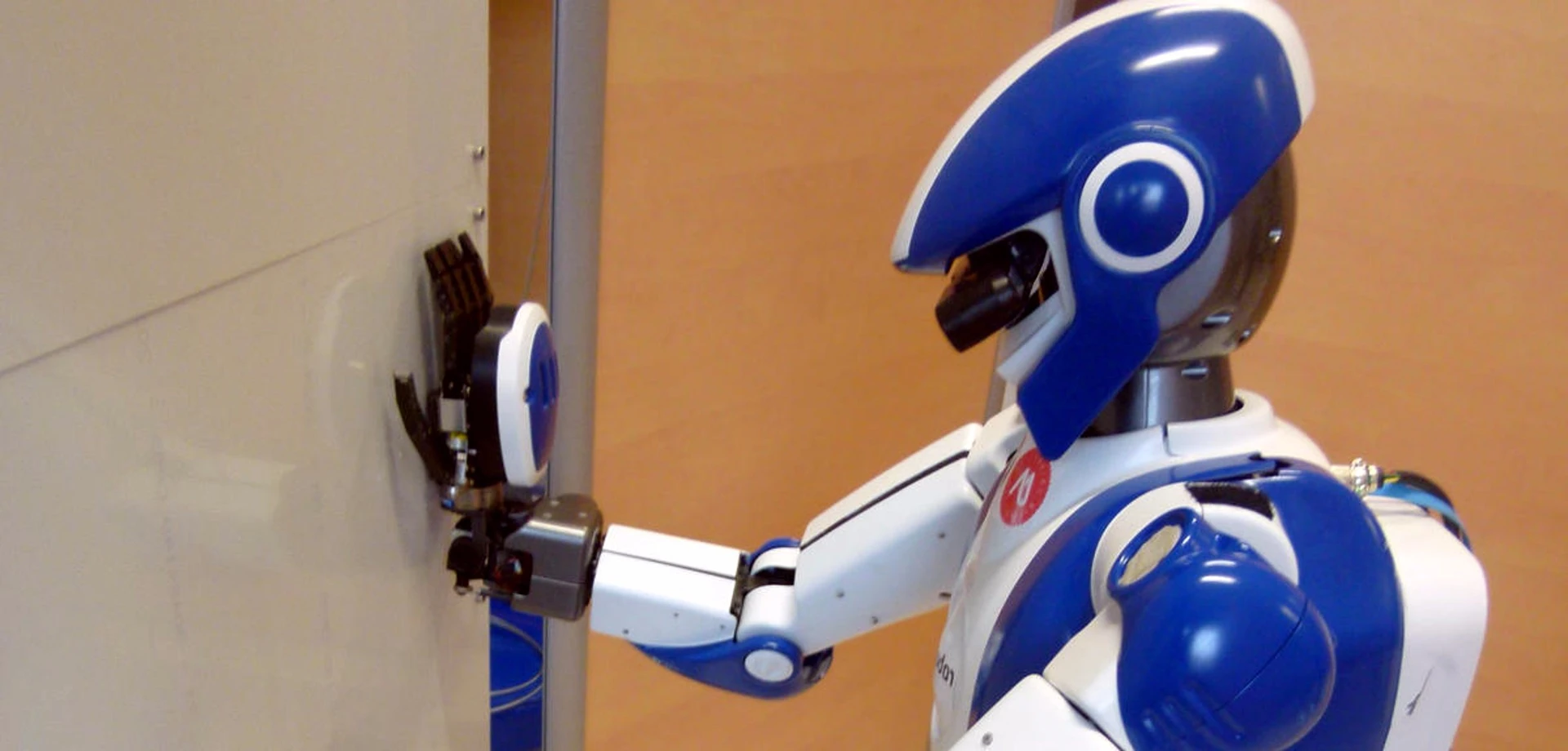
To do this, they need to be capable of moving about in confined areas, often with uneven surfaces, without bumping into surrounding objects. Once in position, they then need to be able to handle screwing, torqueing, tightening bolts, cleaning up metal dust, and inserting parts, and then verify that the task is properly completed.
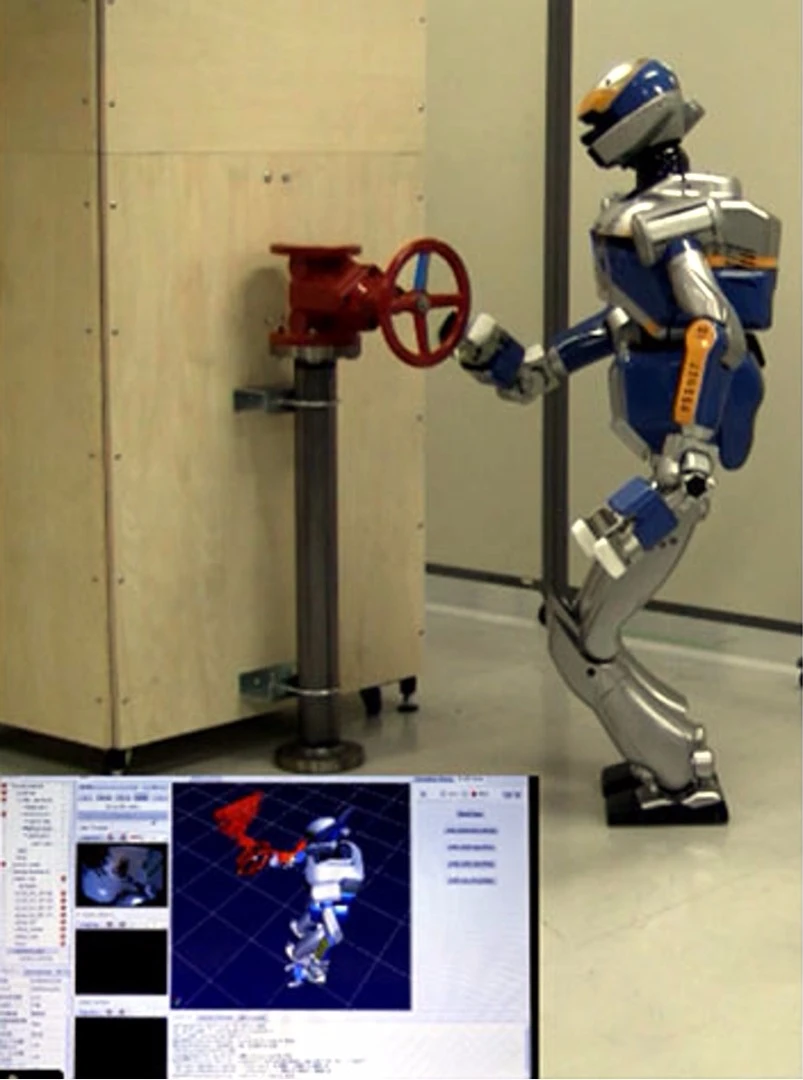
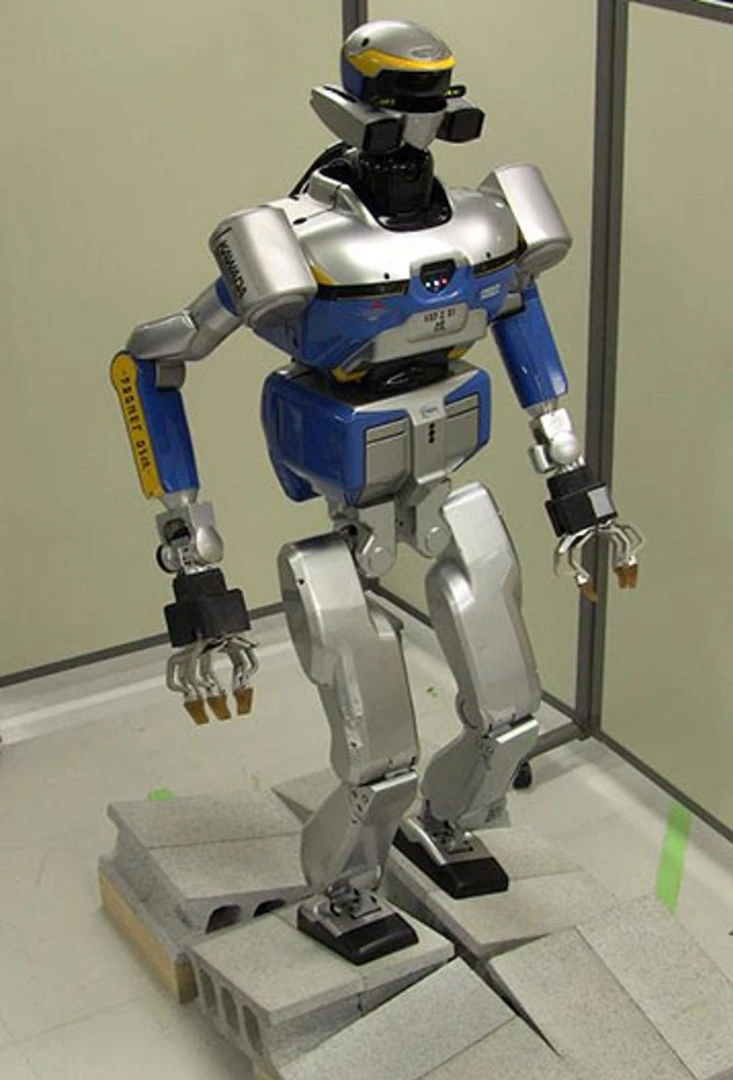
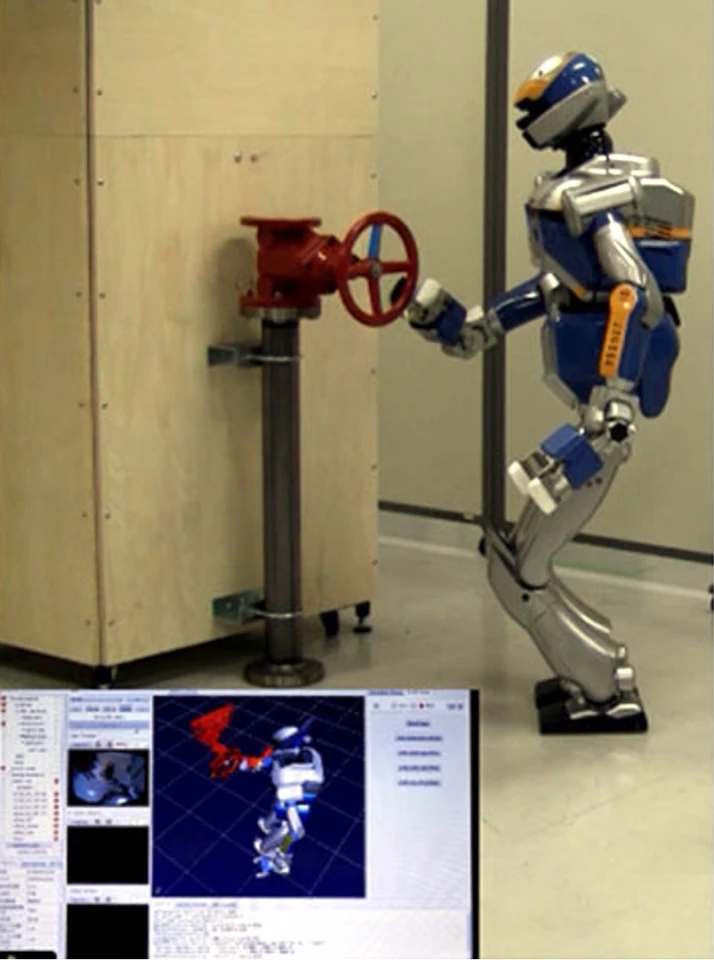
According to JRL, a humanoid shape allows a robot to carry out a larger number of tasks and is especially well suited for working on aircraft, which are specifically designed in detail to accommodate human workers. Using HRP-2 and HRP-4 robots, the team is working to develop ones that not only walk, but can also move using their entire bodies in what's called multi-contact locomotion to crawl into confined spaces on their hands and knees, and climb ladders and stairs.

To do all this, JRL and its partners are writing new algorithms that carry out complex calculations needed to navigate the interior of an aircraft under construction and then modifying their behavior to take into account uncalculated events, such as an unexpected obstruction, while carrying out a task. These need to be fast enough to operate in real time – especially if the robot is working with a human.
JRL says that it's taking a long view of humanoid robots 10 or 15 years from now by not only anticipating advances in robotics, but also expanding the effort to include civil aircraft and helicopters, as well as spacecraft.
"Given the unique nature of aviation assembly and the specialized character of the tasks involved, Airbus Group has very well-defined needs," says Abderrahmane Kheddar, the director of the JRL. "For instance, robots must be capable of navigating through narrow spaces such as fuselages, and executing complex tasks from a variety of positions. In short, the manufacturer needs humanoid robots that can make human movements such as kneeling or leaning, and that can perform more sophisticated functions, such as screwing or torqueing."
The video below shows the JRL robots in action.
Source: CNRS






