



Rescue workers searching flood sites have a unique challenge – they need to know what's under the water, but invariably that water is going to be very murky. Well, that's the main scenario for which the IrukaTact was created. It's a submersible haptic feedback glove that lets users "feel" what's below the surface, without having to dive down to actually touch it.
Designed by Ph.D. candidates Aisen Caro Chacin and Takeshi Ozu at Japan's Tsukuba University, the glove takes its name from the Japanese word for dolphin, "iruka." Like that marine mammal, it uses echolocation to locate items underwater.
In the case of the IrukaTact, that functionality is provided by a MaxBotix ultrasonic range-finding sonar sensor, which points downwards from the wrist. Via an onboard Arduino Pro mini microcomputer, reflected sonar signals from that sensor activate three micropumps.
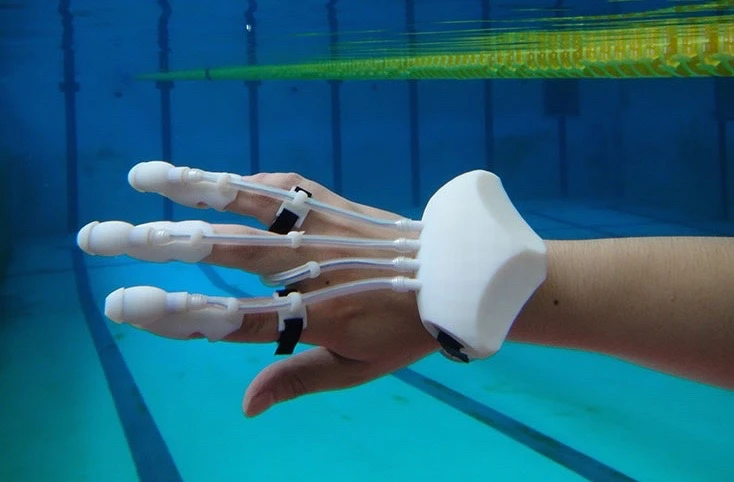
These in turn draw jets of water into silicone caps worn over each of three fingers, selectively pressing against one or more of the corresponding fingertips. The closer an underwater item is to one finger, the greater the pressure that will be exerted on that digit. This allows users to feel the contours of the bottom, or whatever other submerged objects they move their hand over.
The device currently has a sonar range of approximately two feet (0.6 m), although there are plans to improve that figure. Power is provided by an integrated lithium-ion battery.
The researchers believe that the open-source glove could also find use in virtual reality applications such as "digital object simulation in aqueous environments." More information can be found in the following video.
Source: Aisen Caro Chacin via Popular Science





