


If tiny robots are going to one day be making fantastic voyages through our bodies, they'll need to learn how to tackle the treacherous terrain in there. Engineers at Purdue University have developed a new magnetic mini-robot named microTUM, which moves by tumbling end over end and can clamber over bumps, trenches and hills, in wet or dry conditions.
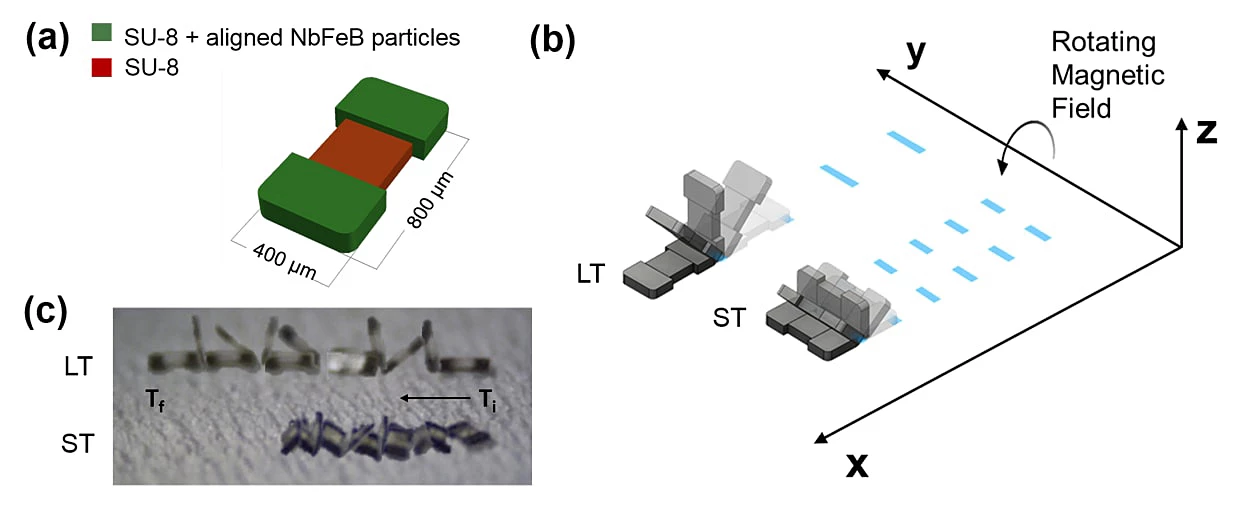
Measuring just 800 microns long and 400 wide, the microscale magnetic tumbling robot (μTUM or microTUM) looks to be in a very similar vein (pun intended) to Max Planck's Millirobot. Both machines are elongated with magnetic ends, allowing them to be controlled with a rotating magnetic field. The middle section can carry drugs or other payloads to deliver them directly to where they're needed in the body.
"Robotics at the micro- and nano-scale represent one of the new frontiers in intelligent automation systems," says David Cappelleri, co-author of a study describing μTUM. "In particular, mobile microrobots have recently emerged as viable candidates for biomedical applications, taking advantage of their small size, manipulation, and autonomous motion capabilities. Targeted drug delivery is one of the key applications of these nano- and microrobots."
But the human body is a varied and hostile environment for a robot, and moving through it is a challenge. Frictional forces on a microscopic scale can make it hard for a microbot to move, and biological fluids also add resistance. Plus, because there isn't much magnetic material in that tiny machine, it takes a relatively powerful magnetic field to get it moving.
The head-over-heels motion is critical to the μTUM's mobility, the team says. Not only does that require a lower-strength magnetic field, but the robot always keeps one foot on the ground, allowing it to scale steeper inclines.
Tested in dry air, as well as in water and silicone oil, the team found that the microbot performed fairly well under all conditions, with different strengths in each. The oil slowed the μTUM down, for example, but allowed it to climb hills at inclines up to 60 degrees, while out in the open air the robot moved faster at the expense of some climbing ability.
"The ability to climb is important because surfaces in the human body are complex," says Maria Guix, co-author of the study. "It's bumpy, it's sticky."
With further work, the μTUM may eventually find use as an in vivo drug delivery system. Before then, the team plans to give the microbot a new vision-based control system to steer it more precisely, and develop the non-magnetic mid-section to carry payloads.
"Replacing this area with a compliant material or a dissolvable payload could lead to improved dynamic behavior, and in-vivo drug delivery, respectively, with far-reaching potential in micro-object manipulation and biomedical applications," says Cappelleri.
The research was published in the journal Micromachines. The team demonstrates the robots in the video below.
Source: Purdue University


