
There are plenty of designs for tiny robots that could one day be swimming and crawling through our bodies to deliver drugs, patch up wounds or clean out clogged arteries. But most of these are limited to one method of movement and might not handle complex terrain. Now, a team from the Max Planck Institute for Intelligent Systems has developed a "millirobot" that can walk, crawl, jump, climb, roll, swim and carry loads like a microrobotic Mario.
The natural world is an unending source of inspiration for robots big and small. Light-steered "Janus particle" microbots were inspired by the tendency for some animals to move towards light sources, while other tiny swimmers propel themselves in ways similar to those used by scallops or bacteria.
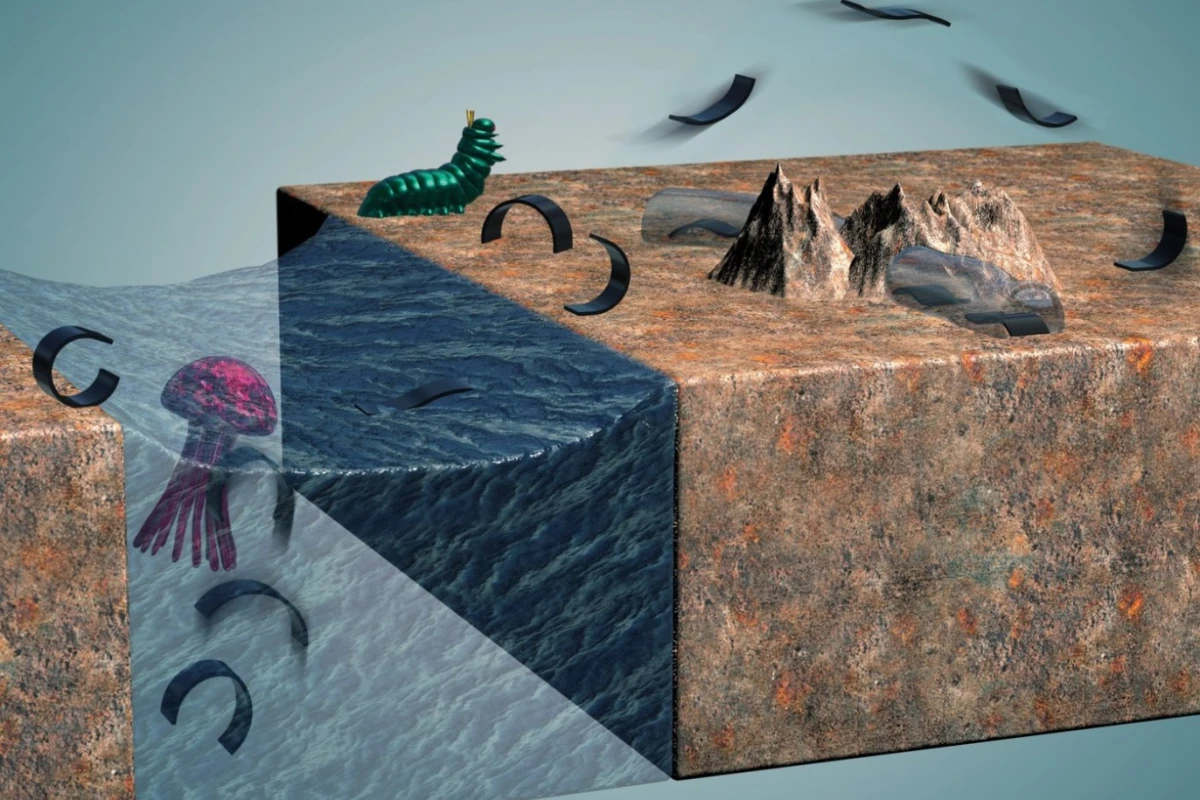
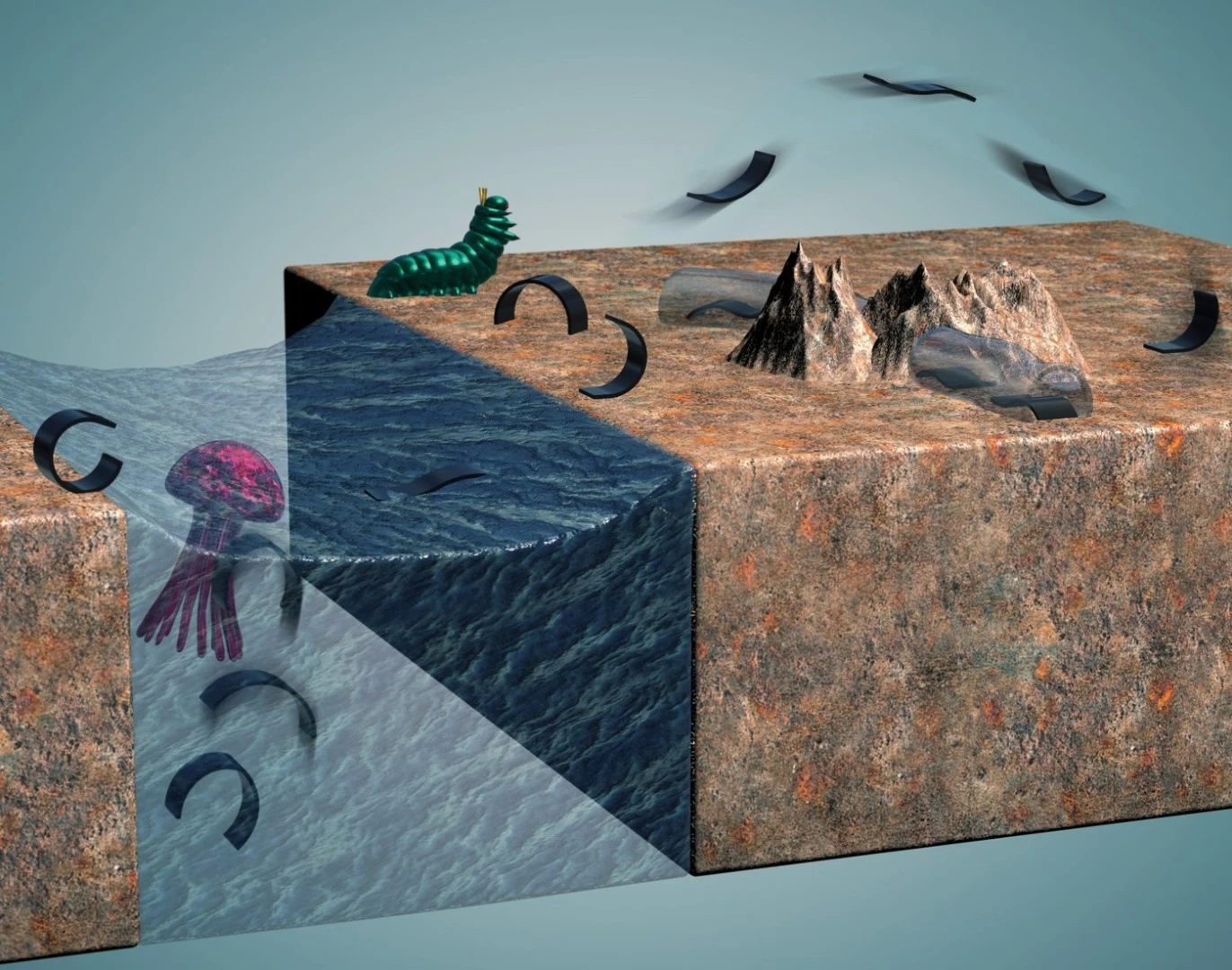
Take one glance at this new millirobot in action and it seems like the humble caterpillar was its clearest inspiration. Measuring just 4 mm (0.2 in) long, the robot is little more than a thin strip of elastic silicon, and it moves by bringing its two ends together to form an arch, before pushing itself flat again. But the Max Planck researchers list a range of other biological inspirations for the bot's different movement methods.
"When we build robots, we look at the mechanics of the movement of soft-bodied biological organisms, for example, and are inspired by them," says Metin Sitti, corresponding author of a study describing the robot. "With our millirobot, the result is a mix of several soft creatures such as beetle larvae and caterpillars. However, a spermatozoid and a jellyfish also served as models."
The millirobot gets around thanks to a set of magnetic microparticles embedded into its rubbery body. By creating and manipulating an external magnetic field, scientists can drive the device by deforming the silicon strip in different ways.
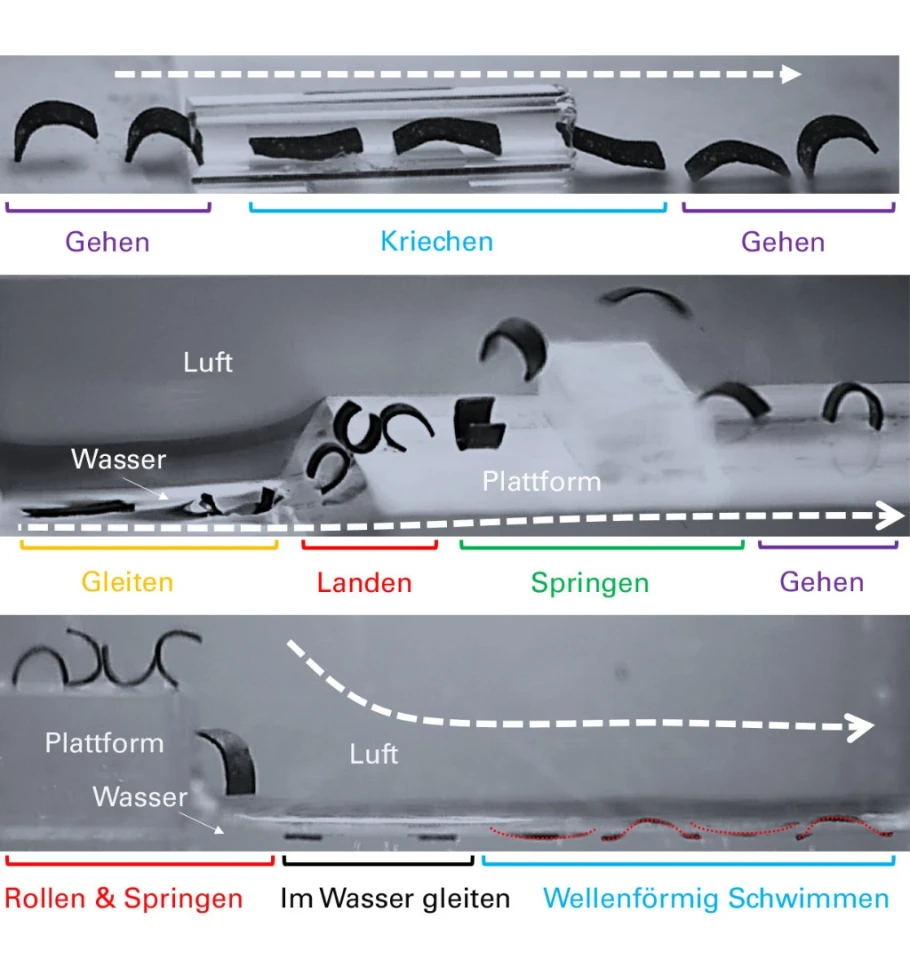
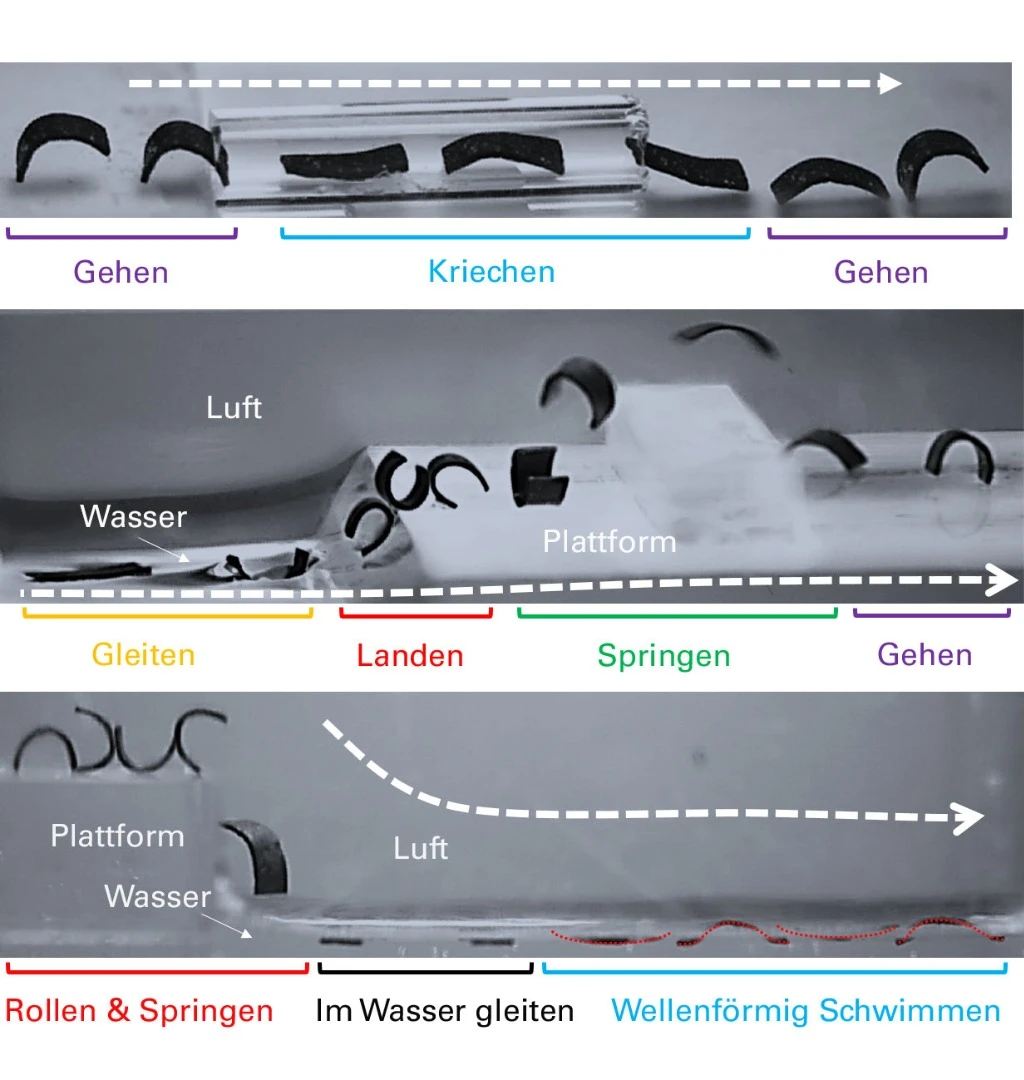
The researchers put the robot through its paces by having it run an obstacle course, where it proved its ability to navigate a range of terrain types. It managed to walk and roll across surfaces, crawl through narrow tubes, jump across gaps, climb steps, swim through liquids, and even pick up, carry and place small objects.
Next, the team tested the millirobot in a synthetic stomach model and in chicken meat, using ultrasound imaging to track its movements when it was out of sight. Once again, the robot aced the tests, and although the human body is a different environment with its own challenges, the researchers say its success bodes well for eventual in vivo use.
"Our objective is that our millirobot will one day transport medication to where it is needed – similar to a parcel delivery to the front door," says Sitti. "We aim to use it in minimally invasive medical procedures on the patient: either by swallowing the robot or by inserting it into the body through a small opening on the skin. From there, the robot can then move through the digestive tract or the bladder, or on to the heart – we envisage numerous possibilities."
The research was published in the journal Nature, and the millirobot's acrobatic skills can be seen in action in the video below.
Source: Max Planck Society





