












Festo, the automation company that designed the bionic penguin and its robotic stablemates – AirRay, AquaRay, AirJelly and AquaJelly – has found another natural model in its latest application of biomimicry – the elephant's trunk.
Festo's Bionic Learning Network research program focuses on mechatronic and bionic concepts using nature as a model. Here's a look back at the concepts created by the company in recent years along with the latest examples of how this approach is leading to improvements in industrial automation systems.
Flying Fish
Mimicking a manta ray and a jelly fish, Festo's "Air" robot concepts are remote-controlled hybrid constructions using a patented beating wing drive called the "Fin Ray Effect". Their design makes it possible for the bionic creatures to “swim” in a sea of air or water in a similar way to the manta rays or jellyfish in water.The Fin Ray Effect
Leif Kniese developed the Fin Ray Effect using the basic principal of fish fins which sees the fin to bulge out in the direction of any applied force, rather than bending away. This seemingly contradictory effect actually allows fish to deploy the full strength of its fin movements in water. Each fin ray comprises two fixed struts that are joined at their tips and forming an acute angle. The two pliable flanks are connected by ribs which hold the flanks apart and allow elastic movement. When one flank is subjected to pressure, the geometrical structure automatically bends in the direction opposed to the force applied.
Rays are expert in submarine gliding – their streamlined form and graceful wavelike movement perfectly combines maximum propulsion with minimum energy consumption and provided perfect inspiration for Festo to develop the AirRay and AquaRay.
The AirRay
The AirRay is a remote-controlled hybrid construction comprising a helium-filled ballonett and a flapping-wing drive mechanism using the Fin Ray Effect. It has a very light construction enabling it to hover in the air by means the buoyant ballonett – a gas-tight bladder of “PET foil” filled with of helium. Propulsion is effected by the wing module which is moved up and down by a servo unit mimicking the tail fins of fish. Camera images can be transmitted live from AirRay, and diagnosis of its operating parameters can be carried out online.

The AquaRay
The AquaRay is like the AirRay but is a remote-controlled fish driven instead by water hydraulics. The central drive and control unit of AquaRay takes the form of a “Festo Fluidic Muscle” combined with the Fin Ray Effect. When the fluidic muscle is filled with air or water, its diameter increases and it contracts longitudinally, giving rise to smoothly flowing elastic movement. The AquaRay can be operated either as a glider or with actively flapping wings, which makes for considerable energy savings. It also has interesting applications for marine research as it will not disturb the natural environment having no rotating parts or propellers, plus its form lends itself to carrying sonar and other test probes.

The AirJelly
The AirJelly is a remote radio-controlled airborne jellyfish consisting of a helium-filled ballonett like the AirRay. The AirJelly is powered by two batteries transmitting force via a central electric drive unit to a bevel gear wheel which in turn powers eight spur gears in sequence, eight shafts activating eight cranks, which each move one of the jellyfish’s eight tentacles constructed using the Fin Ray Effect. Together the AirJelly is propelled by a peristaltic forward motion.
This on its own would not be able to achieve flight however, so the motion in 3D space is effected by weight displacement. A pendulum is set in motion by two actuators positioned at the jellyfish’s “north pole” and are proportionally controlled. The AirJelly's center of mass displaced in the direction of the pendulum’s motion which causes the jellyfish to move in the same direction.

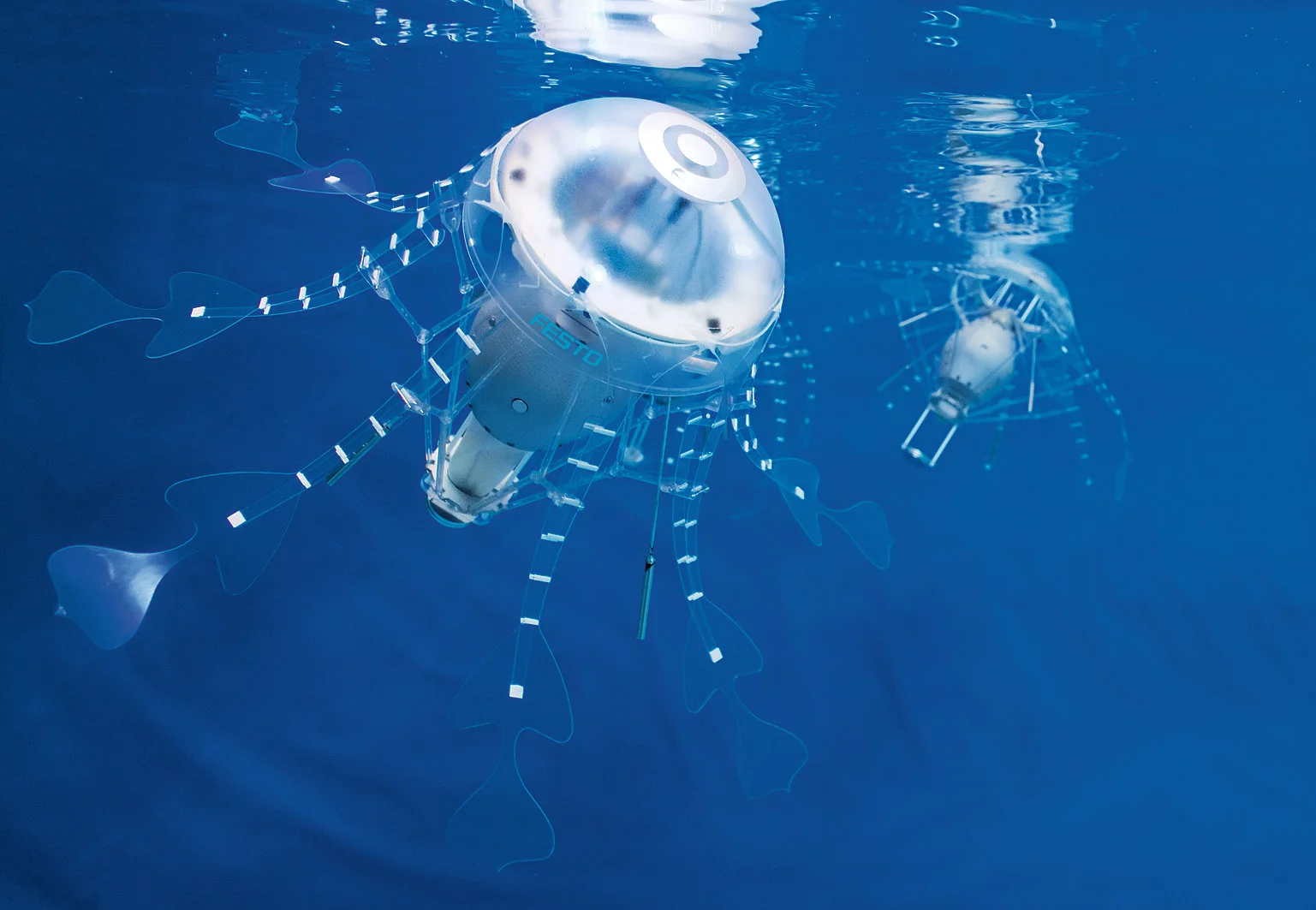
The AquaJelly
The AquaJelly is possibly the most interesting of all the bionic creatures as it has been designed to autonomously emulate swarming behavior of wild jellyfish. Like the others, it consists of an electric drive unit and intelligent adaptive mechanism, but with a control board housed by a translucent dome, a water-tight body and eight tentacles. The control board has pressure, light and radio sensors that work with eight blue and eight white LEDs allowing communication between the AquaJellies.
On the exterior, circles coated with conductive metal paint connected to a charging control unit allow Aqua Jellies to charge from stations above the water surface. When AquaJelly approaches it is drawn towards it, and communicates with the station to ensure it is sufficiently charged.
Communication between other jellies and the charging station is achieved via energy-saving ZigBee short-range radio system, and by pressure allowing each Jelly to be aware of its depth, but the principal communication medium underwater is an infra-red sensor in a sphere of 80cm, allowing it to take evasive action if another Jelly approaches, or any other external influence.

Other creatures in the Air/Aqua range are the AirArm, inspired by lobster and grasshopper legs; the Airacuda and the bIONIC Airfish.
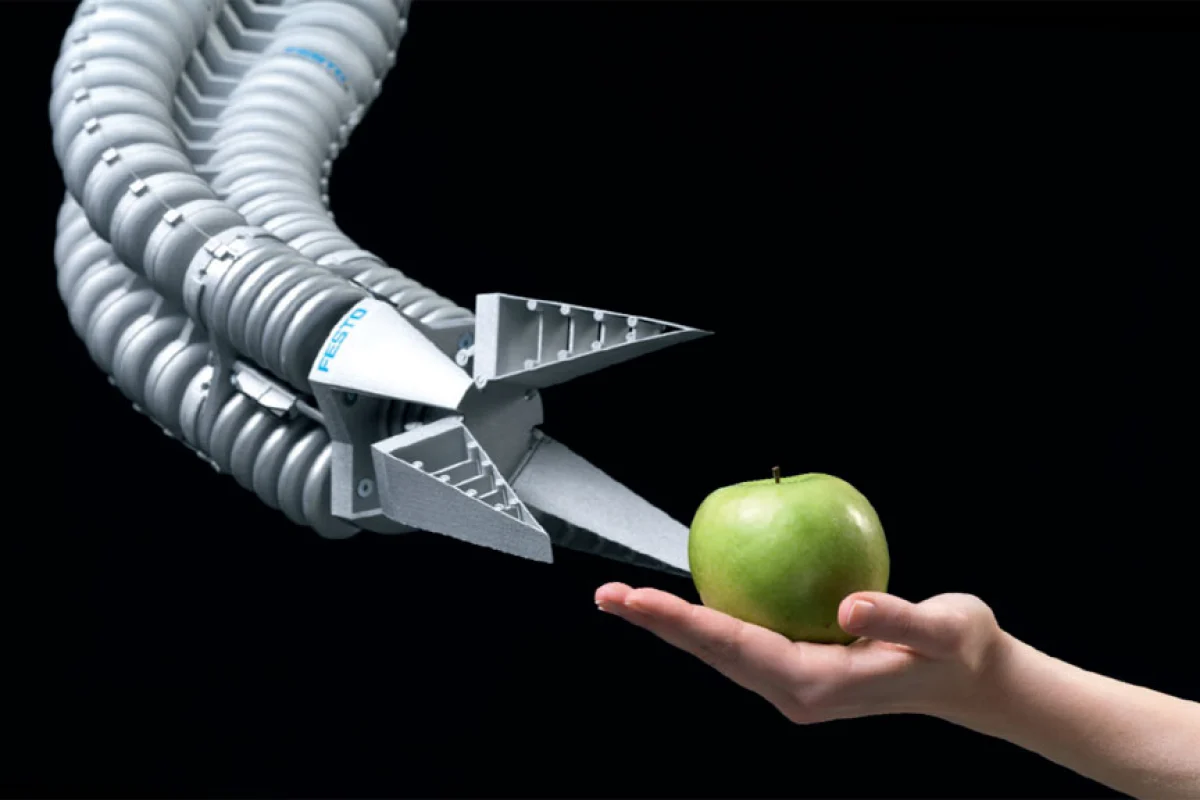
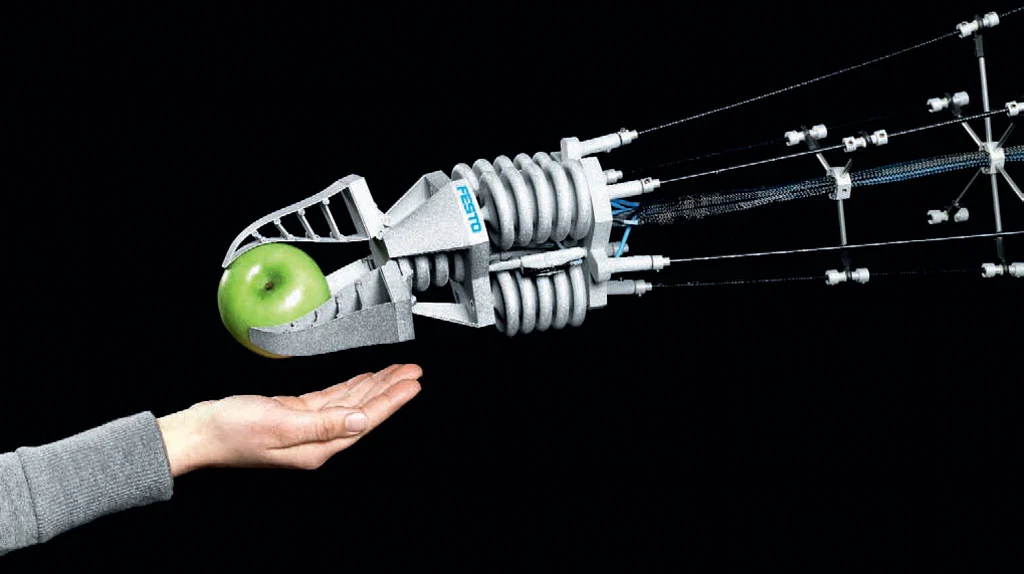
Inspired by the elephants trunk
The latest concepts from Festo include the Bionic Handling Assistant – a biomechatronic handling system inspired by the elephant's trunk. The design consists of a hand axis with ball joint and an adaptive FinGripper for versatile, smooth movement and "unparalleled mass/payload ratio" according to Festo. It's also human friendly because it gives way immediately if there is a collision but doesn't become unstable.
Festo sees applications for the design in agriculture and to domestic households as well as in the automated handling industry.

Other notable product designs include the Bionic Tripod 2.0 – a lightweight FinGripper handling system mounted on a tripod at 90 degrees from the conventional tripod giving it increased flexibility and pliability; and the CyberKite – an automated kite system with a cybernetic control unit permanently maintaining flight with a steerable kite.
The Bionic Learning Network is a collaborative organization between Festo, universities, institutes and development companies.





