





If a robot is going to excel at traversing multiple types of terrain, it shouldn't have an unadaptable "Jack of all trades, master of none" body shape. That's where the GOAT robot comes in, as it automatically changes shape depending on the landscape.
So first of all, no, the bot's name does not stand for "Greatest Of All Time." It's actually an acronym for "Good Over All Terrain." The device is being developed by a team at Switzerland's EPFL university, led by Asst. Prof. Josie Hughes.
The GOAT has a fairly simple body.
Viewed from above in its default shape, the robot sports a flat ring-like frame made up of two looped, intersecting, flexible fiberglass rods. Spaced equidistant around that frame are four rimless spoked wheels, each with its own electric motor.
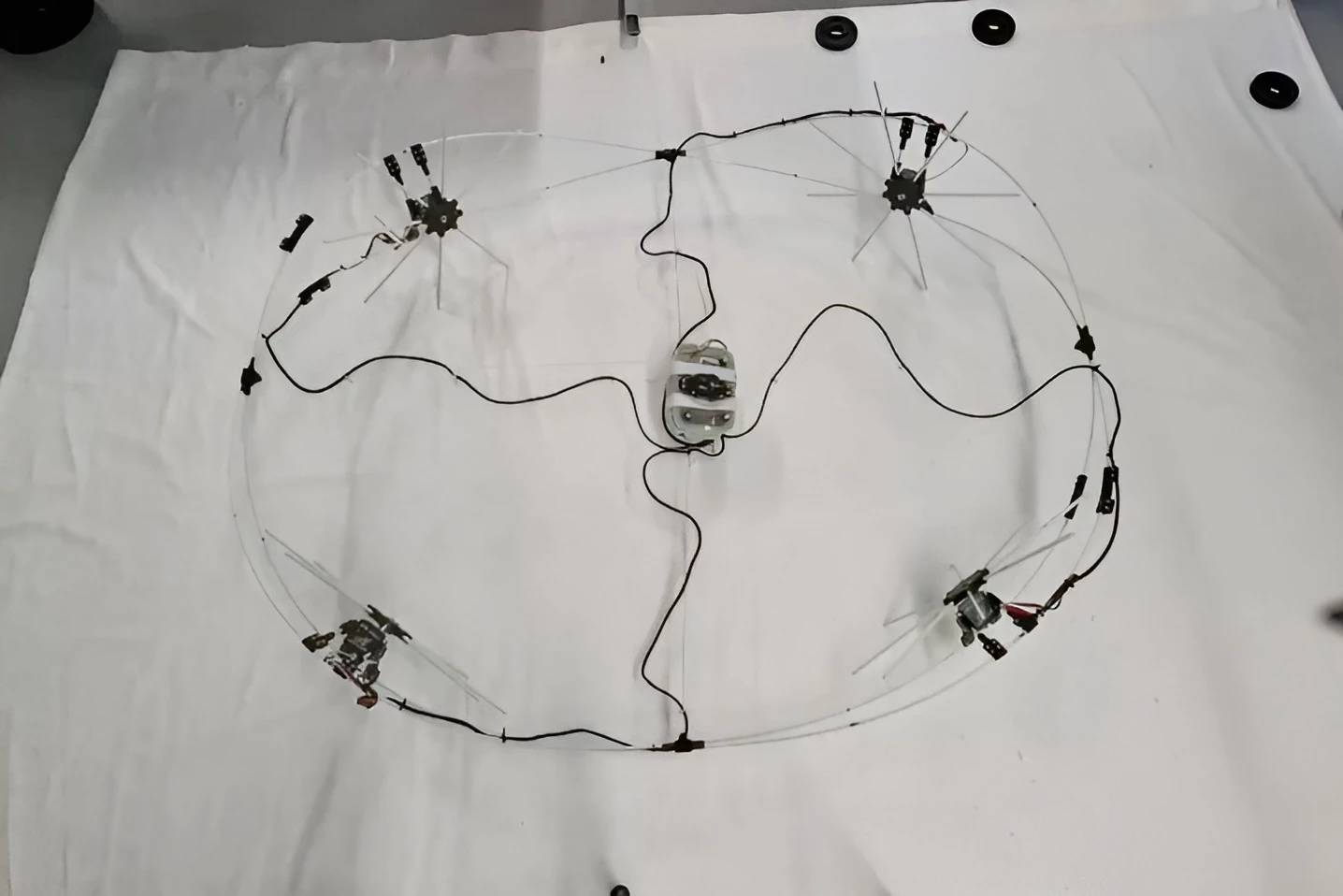
Suspended by cables in the center of the frame is the 2-kg (4.4-lb) control module. It houses the battery, a microcomputer, an IMU (inertial measurement unit), and two electric winches connected to the cables. By selectively winching those cables in or out like tendons – thus exerting or releasing tension on the frame – it's possible to change the shape of the robot.
When the IMU detects that the GOAT is on flat ground, the robot takes on an oval shape with one wheel at each "corner," almost like the chassis of a car. This configuration makes for fast and efficient travel over smooth terrain, or even for swimming across bodies of water.
If the IMU determines that the terrain is starting to get rough, the robot's body widens towards its default ring shape, for added stability. And finally, if a steep descent is detected, the GOAT curls up in a ball so it can simply roll downhill without using any energy – thus boosting its battery range.

Importantly, because the IMU does all the terrain-sensing, the robot doesn't require an onboard camera for visually assessing its environment. This factor reduces the GOAT's weight, complexity, data processing requirements, and energy usage.
In a field test of the technology, the robot autonomously navigated a 4.5-km (2.8-mile) path across mountainous, aquatic, and urban terrain, reportedly outperforming traditional and multimodal robots in versatility, energy efficiency, and robustness.
It is hoped that descendants of the GOAT may one day find use in applications such as environmental monitoring, searching for survivors at disaster sites, or the exploration of other planets.

"Robots like GOAT could be deployed quickly into uncharted terrain with minimal perception and planning systems, allowing them to turn environmental challenges into computational assets," says Hughes. "By harnessing a combination of active reconfiguration and passive adaptation, the next generation of compliant robots might even surpass nature’s versatility."
A paper on the research was recently published in the journal, Science Robotics. You can see the GOAT in mighty morphin' power action, in the video below.
Source: EPFL


