
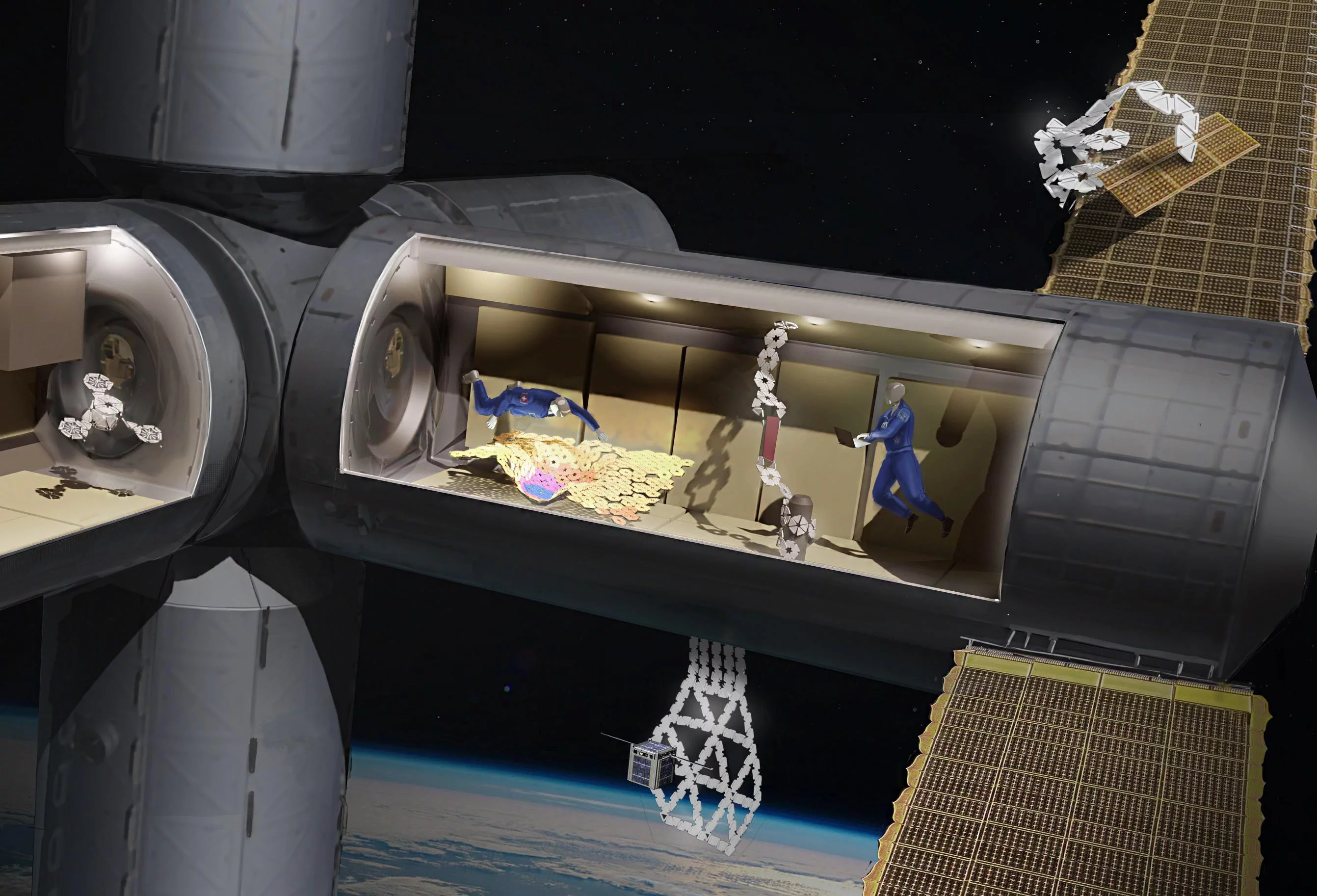
In cramped spacecraft or space stations, there typically isn't room to store multiple robots that are each designed for a specific task. The Mori3 system was designed with that fact in mind, as it can be used to create different types of robots as needed.
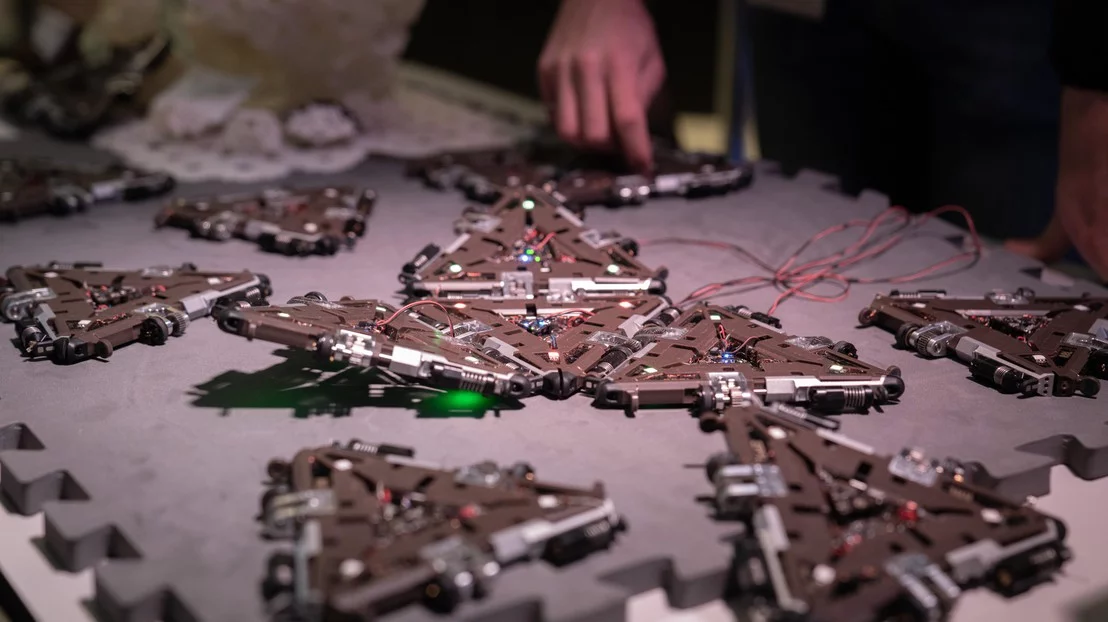
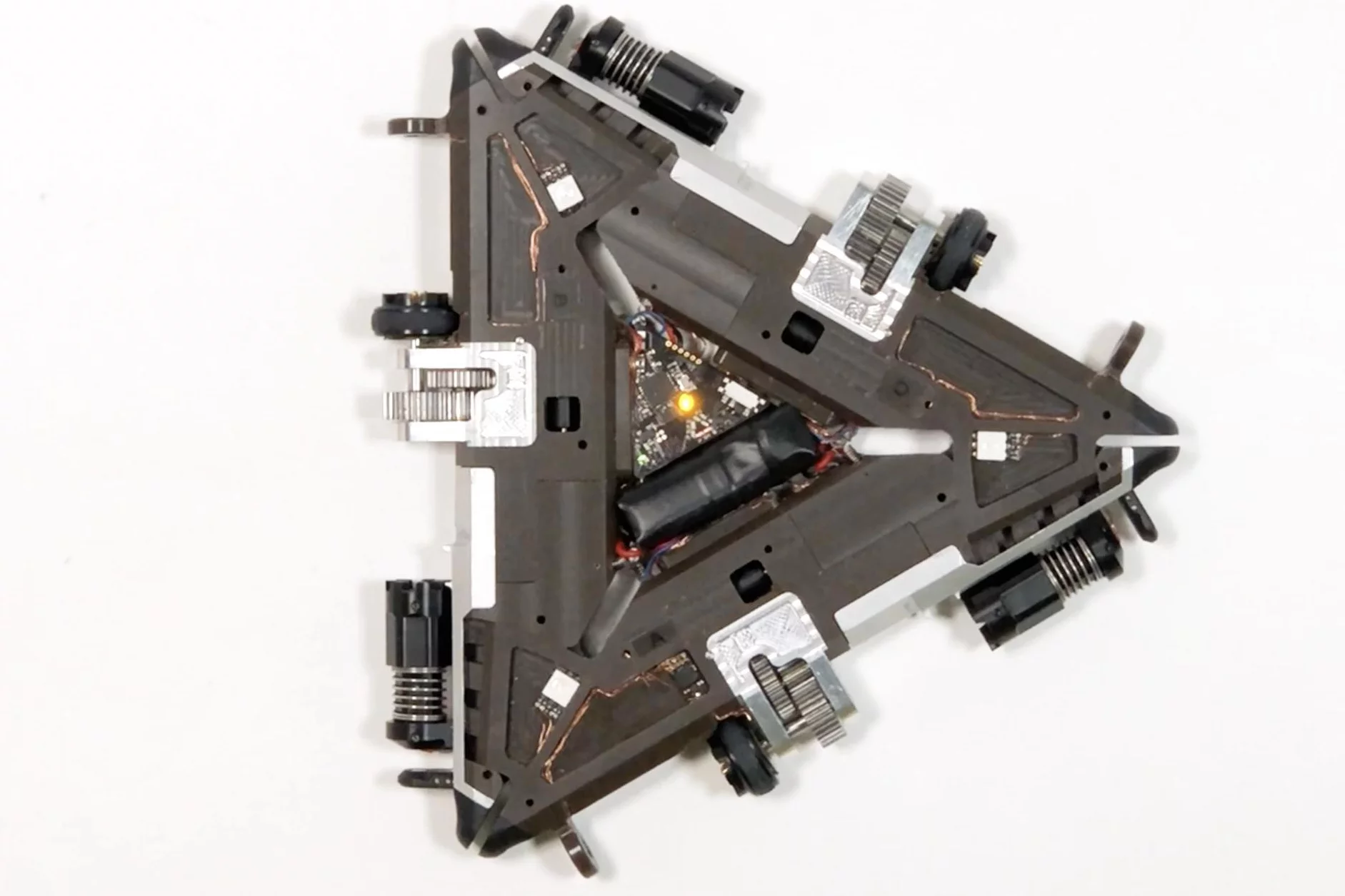
Developed by Prof. Jamie Paik and colleagues at Switzerland's EPFL research institute, the Mori3 setup consists of multiple flat triangular modules equipped with electronics (such as motors, batteries and sensors) and mechanical coupling mechanisms. In a process known as polygon meshing, groups of these modules can be joined together along the edges, forming a single three-dimensional polygon-shaped robot.
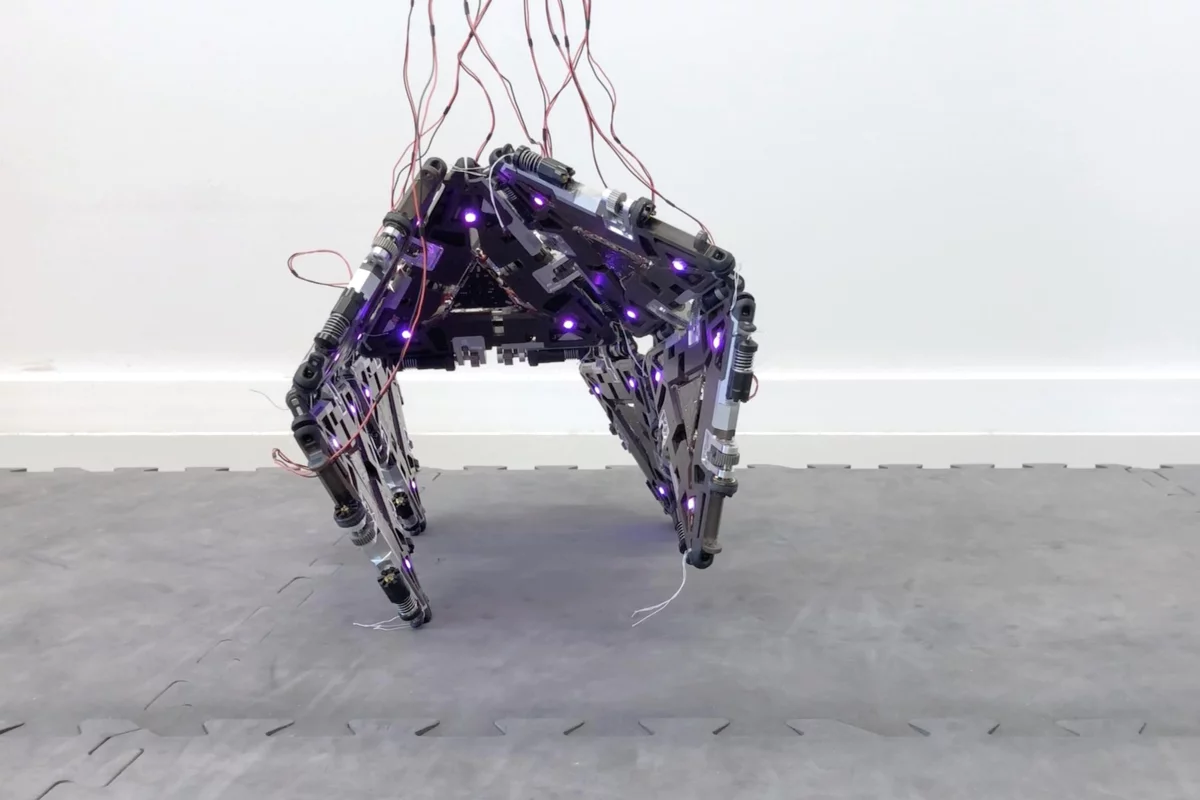
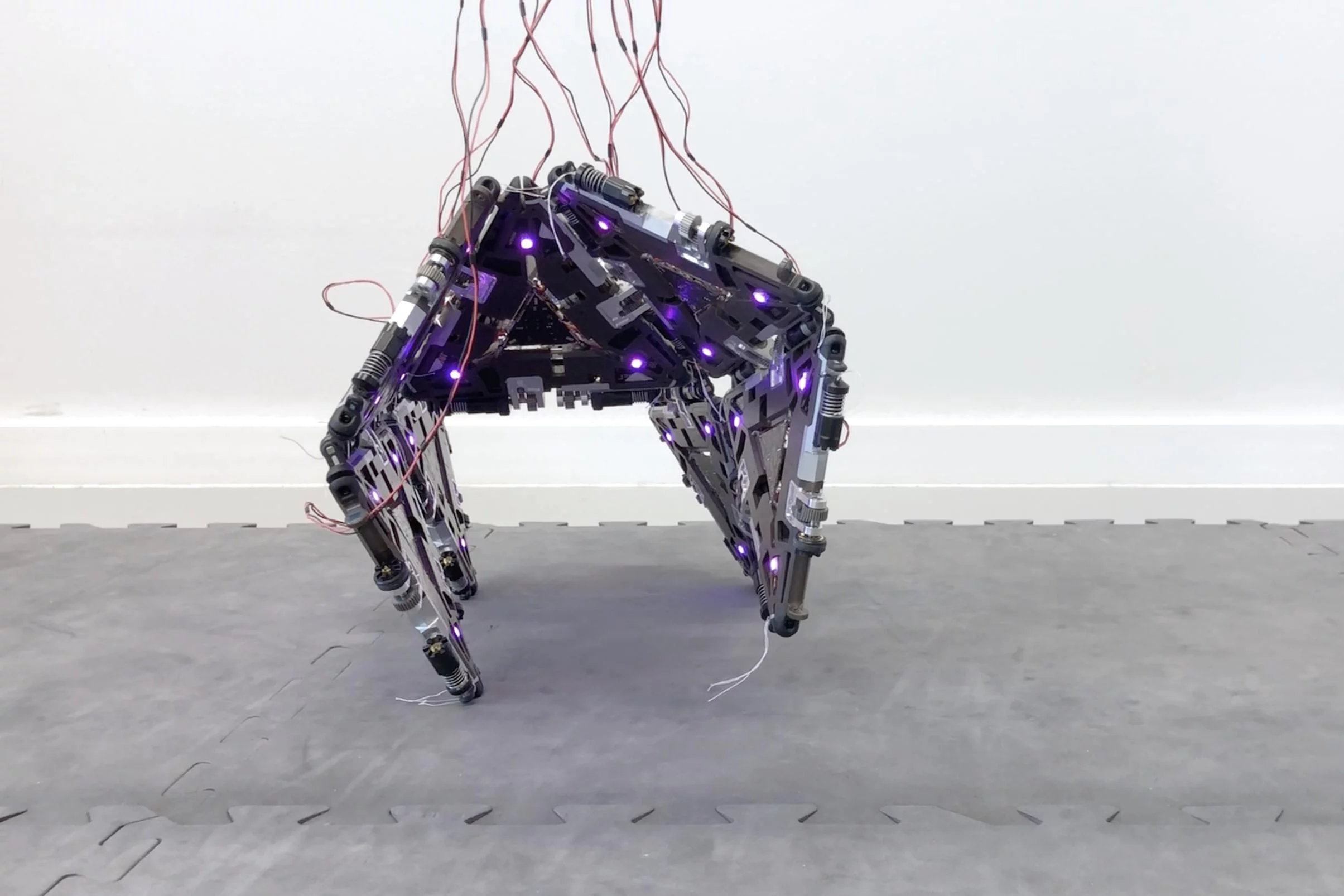
The size and configuration of that polygon varies, depending on the task for which the robot is required. Among other things, it can walk on four legs, form itself into a robotic arm, or roll like a wheel. Additionally, multiple such robots can connect to one another if necessary, temporarily forming into a single larger robot.

According to the scientists, Mori3-based bots "are good at doing the three things that robots should be able to do," namely moving around under their own power, interacting with human users, plus handling and transporting objects. It is hoped that they could ultimately be used for tasks such as assisting astronauts within spacecraft, or performing external repairs on their own.
"Polygonal and polymorphic robots that connect to one another to create articulated structures can be used effectively for a variety of applications," said Paik. "Of course, a general-purpose robot like Mori3 will be less effective than specialized robots in certain areas. That said, Mori3’s biggest selling point is its versatility."
A paper on the technology was recently published in the journal Nature Machine Intelligence. The system can be seen in action, in the video below.
Source: EPFL


