



NASA’s Jet Propulsion Laboratory (JPL) has created a self-propelled, autonomous robot snake designed to explore extreme extraterrestrial terrain. Its first-of-a-kind propulsion system means it can boldly go where no robot snake has gone before.
The robotic snake is called an Exobiology Extant Life Surveyor (EELS) and was inspired by a desire to look for life deep in Saturn’s icy moon, Enceladus.
In the mid-to-late-2000s, when the Cassini spacecraft sent back to Earth images of Enceladus, one of Saturn’s 83 moons, scientists discovered it was active and hiding a salty ocean of liquid water beneath its crust, something that only a handful of worlds are known to possess. What’s unique about Enceladus – which is small enough to fit within the length of the United Kingdom – is that it continuously sprays plumes of icy particles from that ocean, mixed with water and simple organic chemicals, into space.
Investigating these plumes, and the narrow vents they escape from, are what prompted the development of EELS. Construction of the prototype began in 2019 and has been regularly updated. Since 2022, the JPL team has been conducting monthly field tests to refine the robot’s hardware and software so that it’s able to operate autonomously.
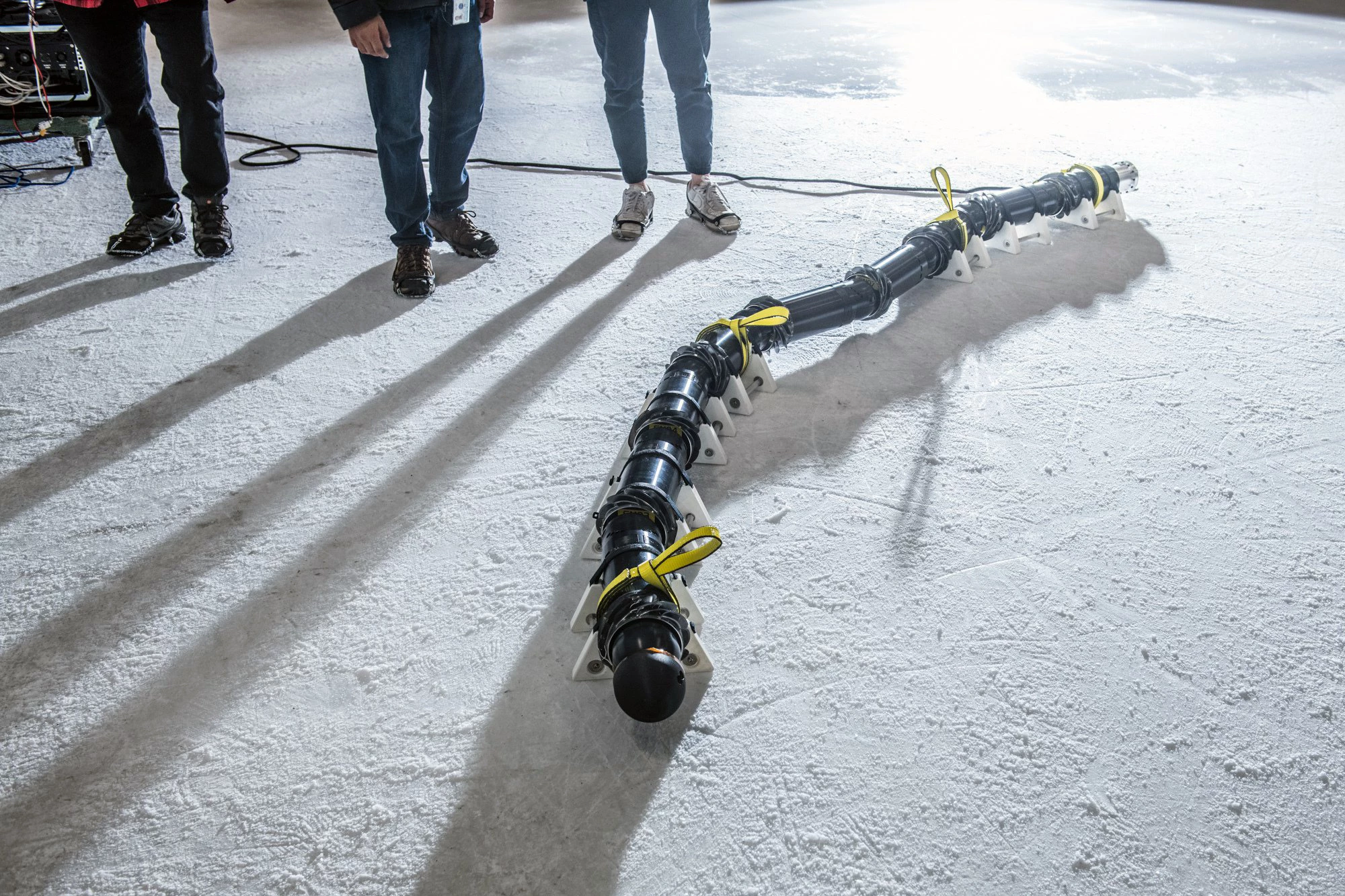
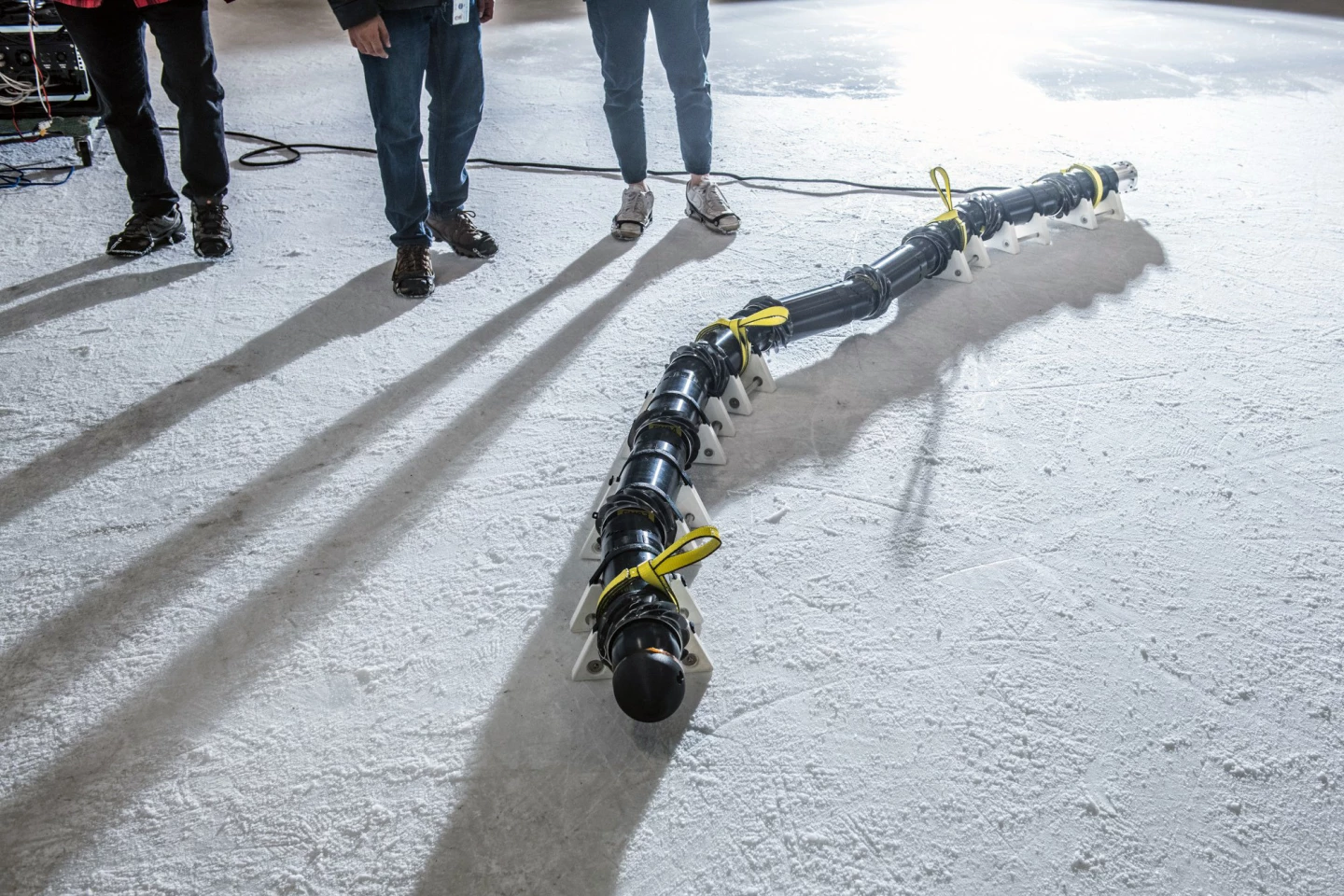
The current iteration of EELS is 13-ft (4-m) long and weighs about 220 lb (100 kg). Its 10 identical, rotating segments use screw heads for propulsion and grip. The EELS team have experimented with different screws for use in different terrains: 3D-printed plastic screws for looser terrain and sharper metal screws for ice.
The team has tested EELS using a snowy ‘robot playground’ at a Southern Californian ski resort, at an indoor ice rink, and in sandy terrain. Because they’ve entered new territory with EELS, the testing process has been instructional.
“We have a different philosophy of robot development than traditional spacecraft, with many quick cycles of testing and correcting,” said Hiro Ono, JPL’s principal investigator. “There are dozens of textbooks about how to design a four-wheel vehicle, but there is no textbook about how to design an autonomous snake robot to boldly go where no robot has gone before. We have to write our own.”
Given the communication lag between Earth and deep space, EELS’ ability to operate autonomously is important. If it runs into a problem, it needs to be able to recover on its own without relying on human assistance.
“Imagine a car driving autonomously, but there are no stop signs, no traffic signals, not even any roads,” said Rohan Thakker, the project’s autonomy lead. “The robot has to figure out what the road is and try to follow it. Then it needs to go down a 100-feet [30-m] drop and not fall.”
To assist with autonomy, EELS uses four pairs of stereo cameras and LiDAR (Light Detection and Ranging) to produce a 3D map of its surroundings. LiDAR determines range by targeting a surface or object with a laser and measuring the time it takes for the reflected light to return to the receiver. EELS uses this information to create navigation algorithms so that it can more easily traverse challenging spaces.
To test EELS’ mapping capabilities, last year, the JPL team dropped the robot’s head – the part that contains the cameras and LiDAR – into a vertical shaft at Athabasca Glacier in the Canadian Rockies. They’ll return to the glacier in September with an updated version of EELS to see how it fared.
EELS’ final form will contain 48 little motors (actuators) that will provide more flexibility. Many have built-in force-torque sensing, which will enable EELS to ‘feel’ how much pressure it’s exerting on the terrain. This will help it to navigate uneven surfaces in narrow spaces much like a rock climber does, shimmying upward or downward by pushing against opposing walls.
The next step is to incorporate scientific instruments.
“Our focus so far has been on autonomous capability and mobility, but eventually we’ll look at what science instruments we can integrate with EELS,” said Matthew Robinson, EELS project manager. “Scientists tell us where they want to go, what they’re most excited about, and we’ll provide a robot that will get them there.”
EELS adaptability means that, aside from Enceladus, the robot snake can be used to explore Mars’ polar caps, or deep icy crevasses on our own planet.
Still, it's some time till EELS will be slithering across the terrain of other planets. Scientists hope the robot will be complete by fall next year, however it's then expected to be a decade-long wait for a spacecraft to taxi EELS to Enceladus.
The video below, from NASA’s Jet Propulsion Laboratory, shows EELS being tested in different environments.
Source: NASA/JPL



