

Robots have come to play an important role in surgery, expanding the playbook of doctors and enabling them to carry out procedures with new levels of precision and control. A new tennis-ball-sized machine developed at Harvard University could open up even more pathways in this field, with the ability to handle delicate tasks on a microscopic scale.
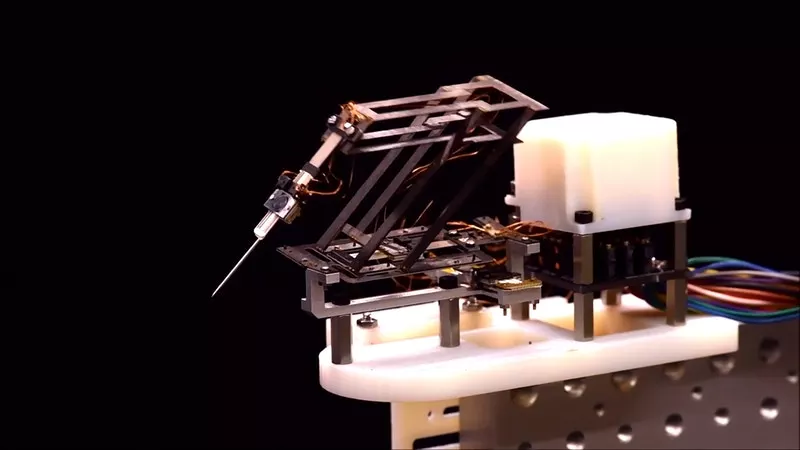
Developed by Wyss Institute Associate Faculty member Robert Wood, Ph.D. and Robotics Engineer Hiroyuki Suzuki of Sony Corporation, the new robot is around the size of a tennis ball, with a parallelogram-shaped platform serving as its main structure. Fixed to the platform are three linear actuators that enable it to rotate, move up and down, and extend and retract an attached tool.
This origami-inspired miniature robot was put together using a cutting-edge manufacturing technique in which the materials were layered on top of one another and laser cut to create the parallelogram. The tiny linear actuators, meanwhile, consist of a piezoelectric ceramic material that deforms to create motion in response to an electrical field, along with optical sensors to ensure the moving parts follow the desired path.
The upshot of this is a robot designed for surgical tasks that is far smaller than the large machines currently in use, which can take up an entire room and are often limited to handling comparatively large tools.
In one test, the team had the robot perform a mock teleoperated surgery, in which it mimicked the motion of a human hand moving a pen-like tool. The researchers had a human look through a microscope and trace a tiny square smaller than the tip of a ballpoint pen, and then had them repeat the task using the robot to trace the square instead. The robot proved 68 percent more accurate.
Next up was an experiment simulating a surgical procedure called retinal vein cannulation. This involves a surgeon injecting therapeutics into veins at the rear of the eyeball, and the team mimicked this process using a silicone tube of around the same size as those tiny veins, which measure roughly twice the thickness of a human hair. The robot was able to cleanly puncture the tube using an attached needle, without causing any unwanted damage.
Also working in this small robot’s favor is an easy setup and installation, and an ability to be picked up and moved by hand. From here, the team hopes to further improve the design by making it more powerful and precise by increasing the force and positioning of the actuators.
You can see the robot in action in the video below, while the research was published in the journal Nature Machine Intelligence.
Source: Wyss Institue


