

Agile robots could certainly come in handy for tasks such as locating victims at disaster sites, which is why we've seen ones that hop, sidewind and "swim" across uneven terrain. One of the latest, developed at Israel's Ben-Gurion University, crawls and sprawls.
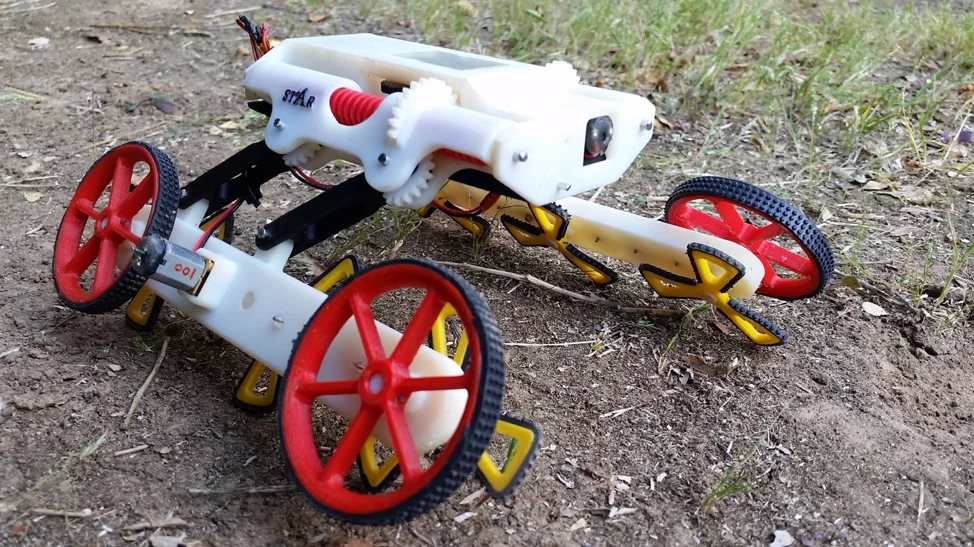
Known as the Rising Sprawl-Tuned Autonomous Robot (RSTAR), the device features both round and open three-spoked wheels. These are are located on either side of arms which pivot downwards and outwards from the robot's main body.
When going across hard, flat terrain, RSTAR uses its round wheels to travel at speeds of over 3 feet (0.9 m) per second. Upon encountering loose surfaces such as sand or mud, however, it can flip itself over, allowing the spoked wheels to take over and dig in.
It can even travel straight up shafts, etc, by extending its legs out so that the round wheels press against vertical surfaces on either side of the robot. This same tactic can be used to travel through horizontal shafts or pipes.
In situations where the terrain is simply too rough for either type of wheels, the robot is still able to move along by doing a bio-inspired "turtle walk." This involves splaying its arms straight out, then alternately heaving its main body forward relative to them, and heaving them forward relative to its main body (the walk is demonstrated in the video below).
Although the current RSTAR prototype is fairly small, the researchers are now working on a larger version that could carry up to 4 lb (1.8 kg) of sensors or other cargo, and that could make its way over obstacles such as stairs. It's also possible that a miniature sprawling robot could ride along on it, ready to jump off and explore tight spaces that the larger robot couldn't access.
Source: American Associates, Ben-Gurion University of the Negev





