Since it launched in 2011, the Robot House at the Southern California Institute of Architecture (SCI-Arc) has challenged students to create material forms of digital models by orchestrating complex robotic movements in space. But aided by the 3D printer they are breaking even newer ground.
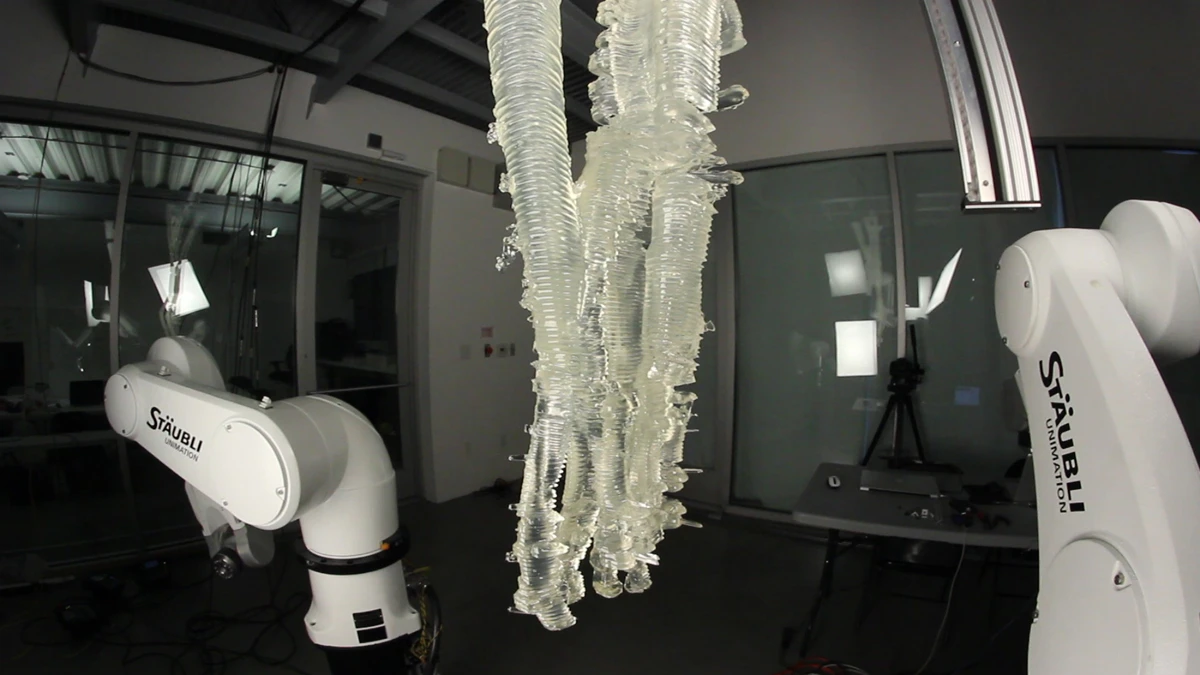
Peter Testa, Principal at Testa|Weiser and founding director of the MIT Emergent Design Group (EDG), initiated and designed the Robot House. The "House" is actually a lab containing 5 medium-scale and one smaller scale robotic arms that can be fitted with an array of tools for gripping and manipulating materials. He explains that from the first installation of the Staübli Unimation robot arms the goal has been to create a "design platform" based on a software program that can accurately relate a digitally conceived design to the creation of physical form, using all or some of the robot arms.

The process is much more complex than, for example, putting designs into a CNC milling machine, as the robot arms move in all directions and have the potential for altering a design as it is being made. The challenge is not only to communicate more precisely to the robots, but also receive feedback as materials change in the process of being manipulated. For example, if a material such as a resin becomes too hot and pliable, the robot could relay this information back and receive a new instruction, or it might trigger blasts of cooling air to return the material to a firmer state. But finding the right material to interact with has been tricky.
Now, using a methodology developed by Sci-Arc graduate students Rania Hoteit and Malek Idriss, 3D printers are being used to make materials as scaffolds and preforms for further manipulation and fabrication. These materials can then be fitted with motion sensors (the kind used to track human movements for animation) to follow the changes in the material as it is manipulated and, hopefully, produce an appropriate response.
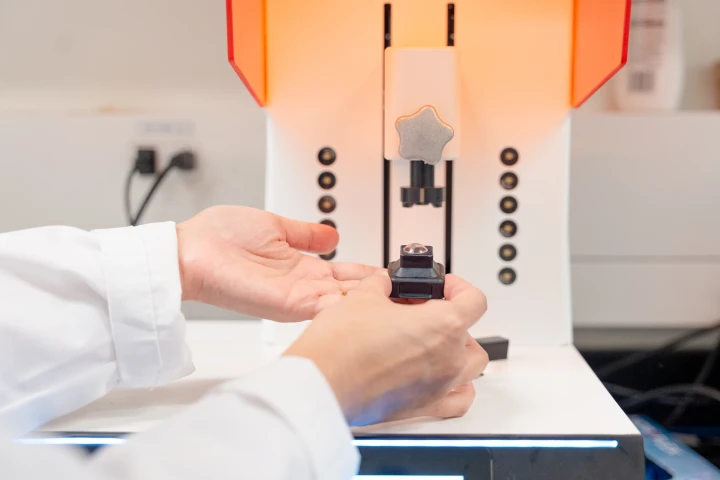
When I visited the lab earlier this month, students had fabricated fittings for the robot arms and a polymer in multiple strands using the 3D printer. The idea was to fit those strands with sensors and test out changes and responses between three robots.
Peter Testa explains that using 3D printing to make materials as scaffolds and preforms for further free-form fabrication processes is a new development, and the methodology invented by Hoteit and Idriss is being pursued in his current ESTm (Emerging Systems Technologies and Media) Graduate Design studio.
So instead of using the printer to produce an object that is an end in itself, a nice model of the Guggenheim to put on your desk, say, this is about using the printer to enhance further applications of the experimentation with the robots. The current availability of new materials in the 3D-printing space, such as polymorph and other shape-memory polymers now makes this kind of research possible.
Exploring the future of fabrication
The use of 3D printing as a step toward further exploration with robotic systems highlights the broader possibilities being explored in the Robot House. The very name "Robot House" suggests a house built by robots (in traditional materials), which would involve robots being engaged in targeted, industrial-type tasks, such as those seen in car manufacturing. In fact, the range of motion these robots are capable of is much more extensive (as the robots are not geared to a specific function and so are much closer to the original Stanford Arm, the six-axis industrial robot developed by Victor Scheinman at Stanford University in the late 1960s). Their potential in helping to develop new materials is a sign that the technology being explored here is looking beyond known systems and fabrication methods. Having said that, Peter Testa explains that a significant gap still exists between the world of digital modeling and the physical realm of the robots. It’s about a "translation between the two worlds," he says, and this is where he sees the really exciting future of technology. As many techno pundits have remarked, the flat screen has just about run its course, the next wave of technological advance will be in three dimensions.
How we got here
"What we’re doing now would not have been possible even five years ago," says Testa. Firstly, because the robots would have been too expensive, as would the 3D printers. Secondly, the knowledge of how to work in this system is now more available, through the internet and open-source software tools. The robotic arms were industrial models operating in a closed system. "We had to do a lot of hacking to get into the systems. But we now have the means to do that,” says Testa, who also emphasizes the determination and mindset of the students who have been working on the project. "We have a generation of students who have that capacity and don’t see the limitations that earlier generations of students did.” And lest anyone imagine that working with robots requires some sort of solitary mad scientist sort of character, Testa maintains that the program requires and encourages collaboration, not only between humans and robots but among the students, from the testing of the software to the designing and creation of their 3D-printed materials to the synchronization of the five larger arms, which were initially controlled by five individual students working in concert.
"We are not just putting this forward as the next step in digital fabrication, but actually a re-thinking of computational, computer-based design, digital design, I like to call this Digital 2.0," says Testa.
Source: SCI-Arc