


If you're trying to capture delicate deep-sea creatures such as sea slugs via camera-guided remote control, you're certainly not going to use hard steel pincers designed for use in the oil and mining industries. It was with this in mind that a Harvard-led team recently developed an underwater robotic gripper that has a soft touch.
Built upon previous research, the device is designed to be used in conjunction with a remotely-operated vehicle (ROV), that's controlled in real time by a human operator in a surface-located support ship.
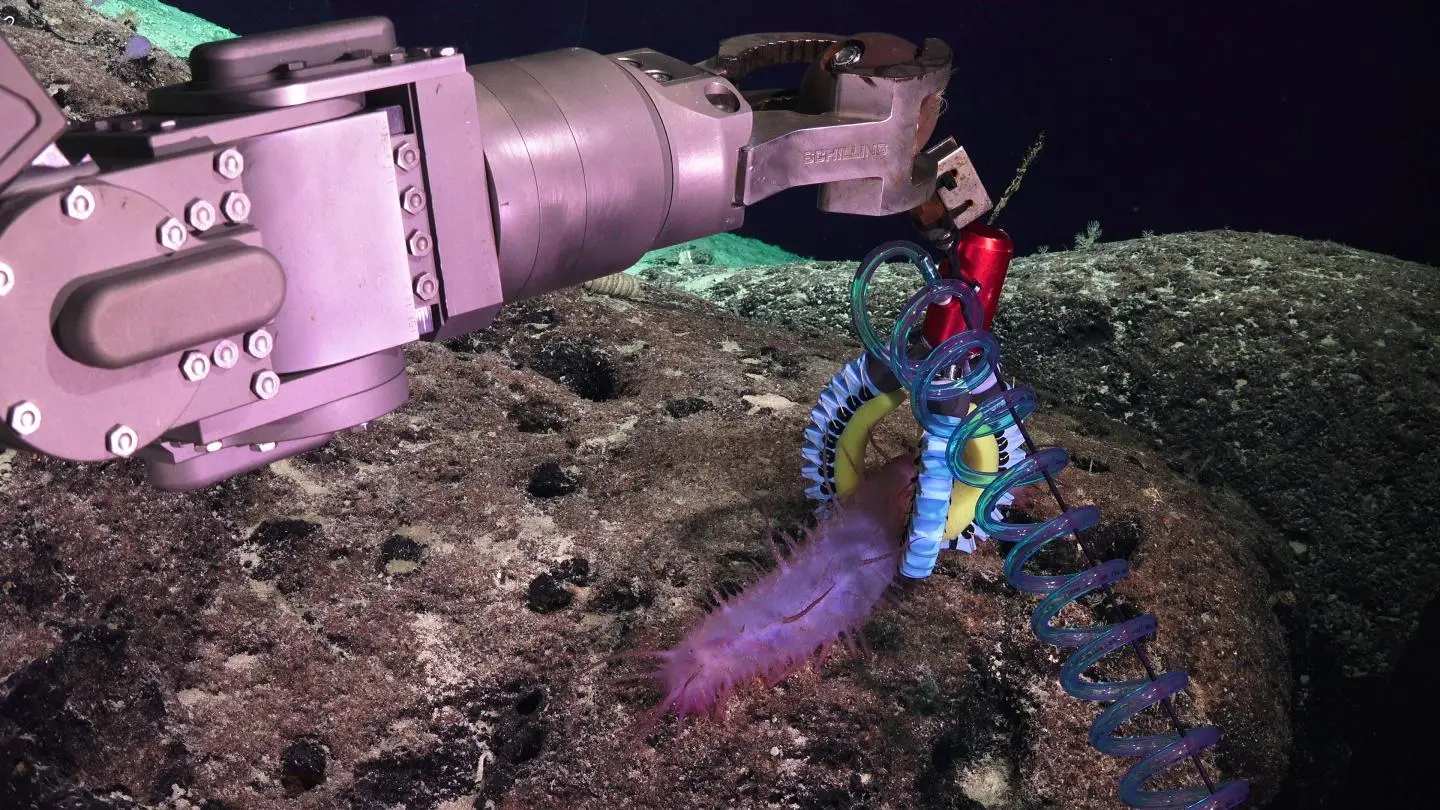
The gripper has been trialled in various forms, sporting two to five squishy polyurethane fingers. Those fingers can be made to open and close on target objects – such as small, fragile animals – using a low-pressure hydraulic system that pumps seawater in and out of them. All of the fingers are attached to a central wooden ball, which is in turn held by the ROV's existing steel pincers.
Because the fingers are 3D-printed, new ones designed for specialized tasks can be manufactured onboard remotely-located research vessels as needed. Otherwise, scientists would have to wait until they got back to the lab to create new fingers.
To that end, the technology was recently tested on an expedition in the Phoenix Islands, located in the South Pacific. There, different versions of the ROV-mounted gripper were used to harmlessly pick up and examine creatures including sea slugs, corals and sponges, at depths of up to 2,224 m (7,297 ft).
Based on feedback from the ROV operators, the scientists 3D-printed and added additional features to the fingers – these included wedge-like soft "fingernails" that allowed the fingers to more easily slip underneath objects, along with fringy extensions along the sides of the fingers, that formed a barrier to keep animals from slipping out between them.
"When interacting with soft, delicate underwater creatures, it makes the most sense for your sampling equipment to also be soft and gentle," says Dr. Rob Wood, co-author of a paper on the study. "It's only recently that the field of soft robotics has developed to the point where we can actually build robots that can grasp these animals reliably and harmlessly."
The paper was recently published in the journal PLOS One, and the gripper can be seen in action in the video below. For another take on a Harvard-designed marine-animal-grabber, check out the RAD sampler.
Sources: Wyss Institute at Harvard University, PLOS via EurekAlert





