


When you imagine robots, you probably aren't picturing stretchy meshes that can float on water, but that's exactly what researchers at North Carolina State University have developed. These soft structures are 3D printed and embedded with magnetic particles that let them stretch and compress to pick up and move small objects.
To make these "robotic" meshes, the team first mixed up an "ink" made of silicone microbeads, liquid silicone, water and, importantly, iron carbonyl particles. With the consistency of toothpaste, this stuff can then be 3D printed into various mesh shapes, which are then cured in an oven to form soft, flexible structures. As a bonus, these can float on the surface of water like an insect.
To control the structures, the team can alter a magnetic field, ramping the strength up and down or turning it on and off. Turning on that magnetic field might, for example, cause the mesh to scrunch up towards one end, before springing back out to its full size when the field is switched off again.
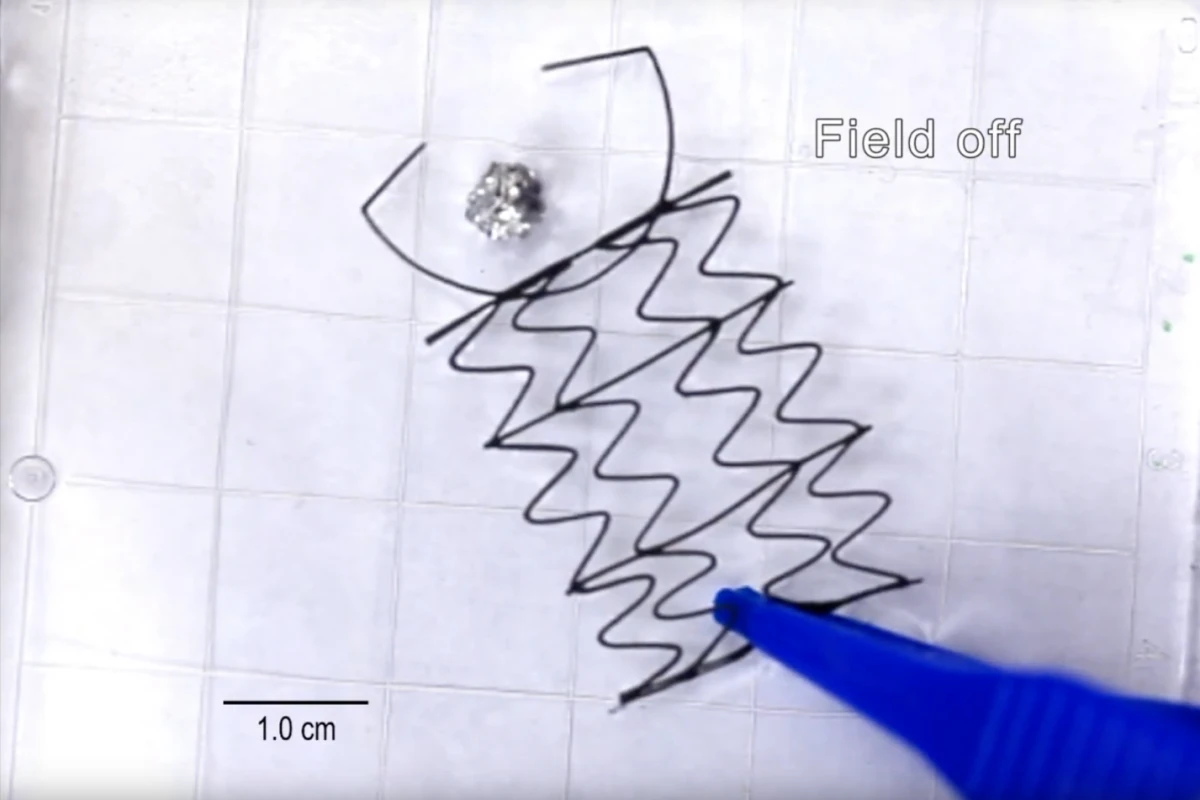
By altering the size and shape of the meshes, the team was able to create a few different "robot" designs for various purposes. In one example, the researchers made a kind of grabber in the form of a spring with a claw at one end. When the magnetic field is switched on, the spring section bunches up, dragging the claw with it. By flicking the field on and off, the researchers are able to extend the claw out, grab a small ball of aluminum and drag it in.
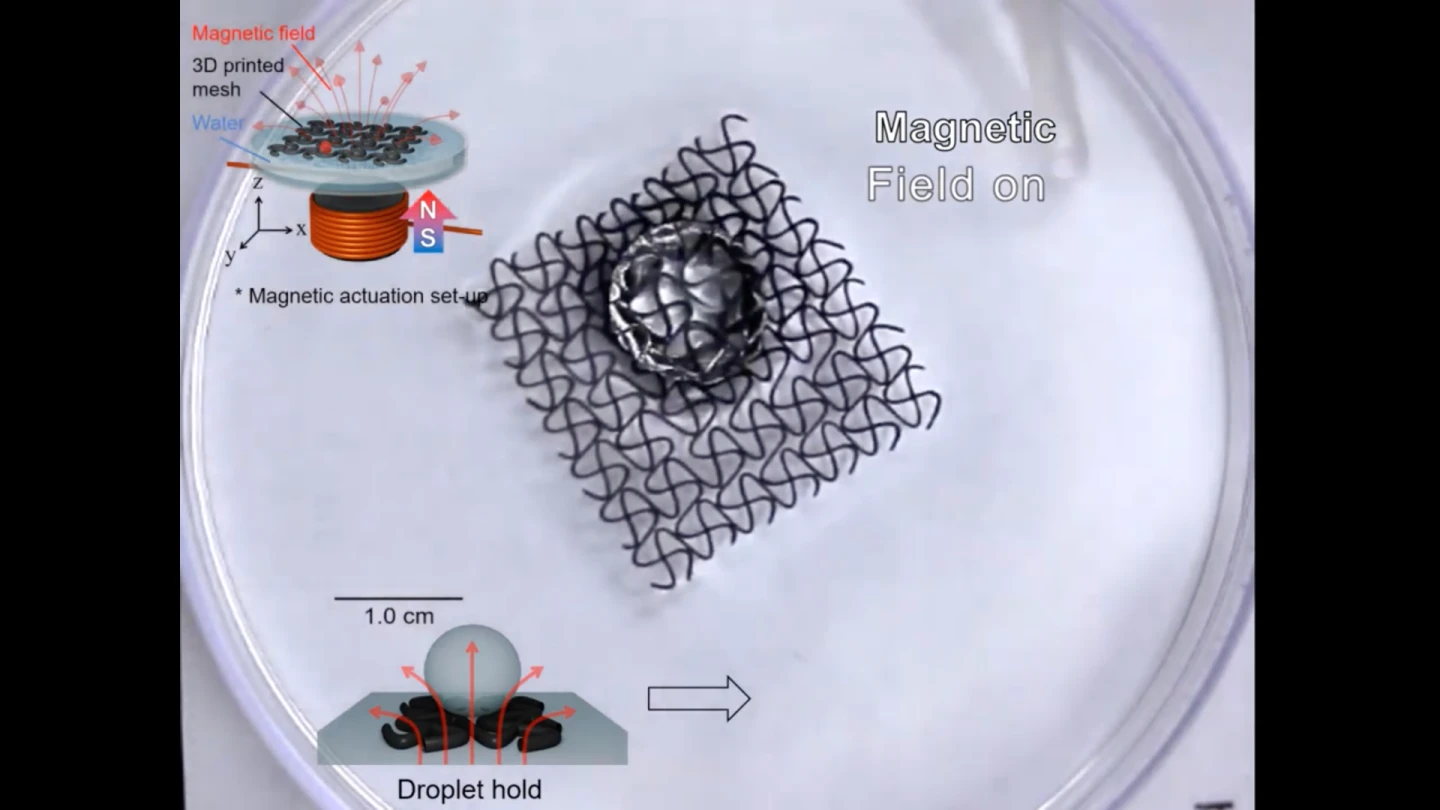
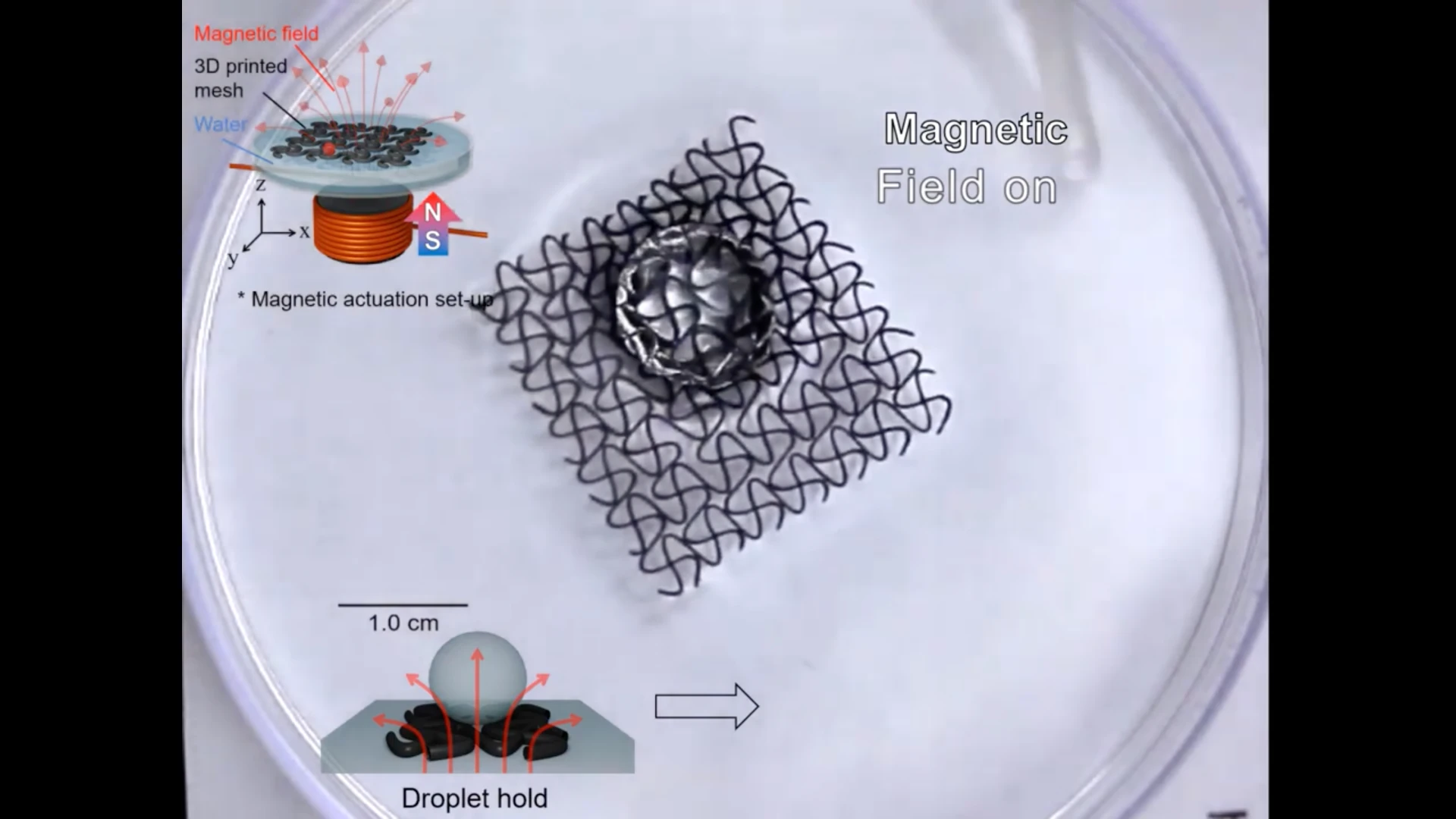
In another example, the researchers made a large, flat sheet with more "wires" bunched up in the middle. When the magnetic field is turned on, the mesh contracts towards the center, letting it hold a droplet of water on its surface. But turn the field off and the mesh stretches back out to its full size, letting the droplet fall through into water below. That design could allow for the transportation of liquids, and the option to mix them on demand.
"This research shows capabilities in the emerging field of combining 3D printing and soft robotics," says Orlin Velev, corresponding author of the study. "For now, this is an early stage proof-of-concept for a soft robotic actuator."
The research was published in the journal Advanced Materials Technologies, and the robot designs can be seen in action in the videos below.
Source: North Carolina State University





