

With the swimming program of the London Olympics now completed and medals awarded, many will now be casting their attention forward to Rio in 2016 and how competitors can be helped to swim faster, how they can be made stronger, and what swimwear can be developed to improve their performance. Researchers at the Tokyo Institute of Technology are hoping to answer these questions by developing a humanoid robot able to reproduce realistic swimming strokes.
The brainchild of Chung Changhyun and Motomu Nakashima, the plastic and metal robot dubbed “Swumanoid” arose from the difficulty that Changhyun and Nakashima faced in studying human swimmers.
Their work required precise measurements and analysis of such factors as the driving force by the swimmer’s hands and the body’s resistance to movement through the water. Unfortunately, conventional techniques that relied on studying human swimmers on video weren’t satisfactory. Sensors wouldn’t fit to swimmers’ bodies and too much depended on the swimmer’s being able to exactly reproduce their movements time after time.
That is where Swumanoid came in. Based on previous work by Nakashima and others involved in the swimming human simulation model SWUM (SWimming hUman Model), Swumanoid was designed to allow the researchers precise, repetitive control of movements and forces.
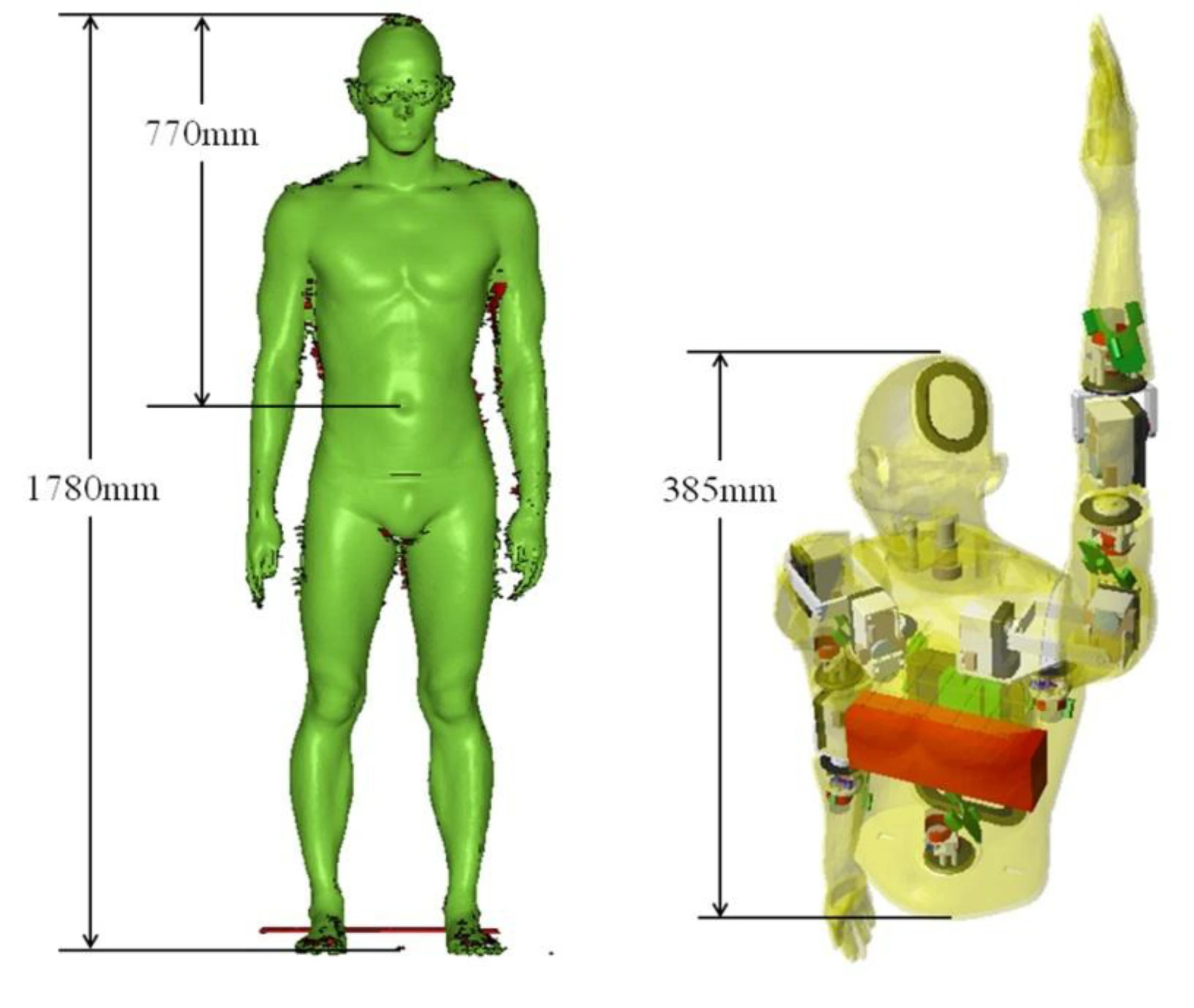
The robot itself is only half human scale, with an instrument-packed plastic shell based on the analysis of bodies of swimmers captured using a 3D body scanner. Though smaller than the average swimmer, it has the same body proportions and features. Twelve waterproof motors operate the upper limbs and one works the waist. Each arm has six degrees of movement – the elbow has two and the shoulders four. The latter is particularly important because Swumanoid is required to make large arm movements that are unusual for a humanoid robot, so additional joints are needed to take the place of a human scapula.
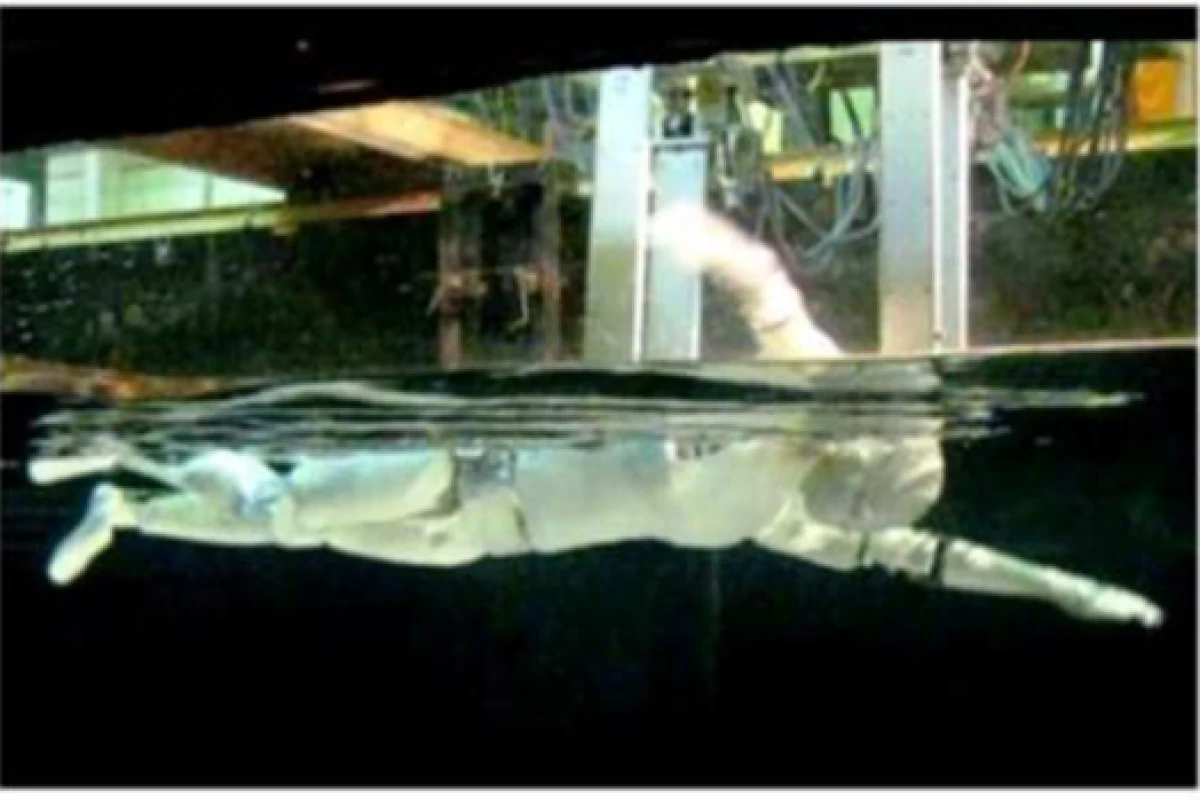
A computer controls the robot’s movements and allows it to mimic human swimming so well that it can do the front crawl – one of the most complicated swimming strokes. It can also do backstroke and butterfly, but breaststroke, which requires different leg movement, is beyond its current capabilities. Further development will involve increasing the robot’s speed, which currently stands at 0.64 m/s (2 ft/s), and improving leg movement to give it the ability to do breaststroke. The current model is also supported by four struts, but the team hopes to develop a free swimming version in the future.
The results of the Swumanoid project will be made public in Taipei at “The Fifth International Symposium on Aero Aqua Bio-Mechanisms,” which runs from August 25 to 28, 2012. What Swumanoid’s career will be remains uncertain, but perhaps by 2016, the latest model will give Michael Phelps a run for his money.
Swumanoid can be seen in action in the video below.
Source: Tokyo Institute of Technology via DigInfo.tv






