
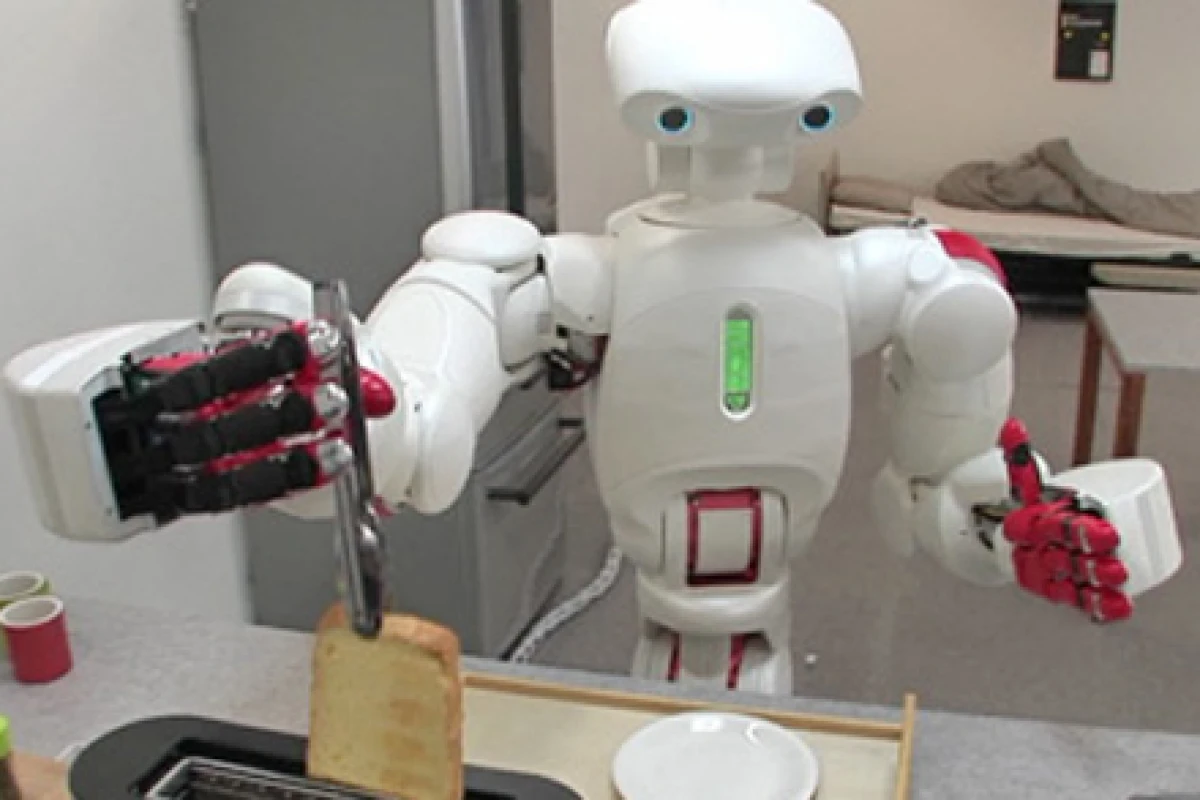

Japan, like many other countries, faces a rapidly aging population sparking concerns about how the elderly will be cared for in their twilight years. Japan being Japan has turned to robotics with researchers developing robots to assist the elderly with everything from exercise and independent living to shopping. Twendy-One is the latest robotic helper to join the fray designed to support aging people in their daily activities.
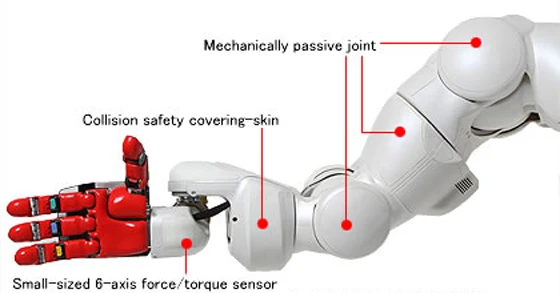
Described as a “human symbiotic robot” Twendy-One is designed to co-exist with humans and assist with nursing care and housekeeping. To this end its developers focused on safety, dependability and dexterity in constructing their robot. For collision safety the robot’s outer shell is overlaid with soft silicone skins and force sensors that detect physical contact with a person on any part of its body. This is a key component of a “passive impedance mechanism” that enables the robot to adapt to unexpected external forces on the fly.
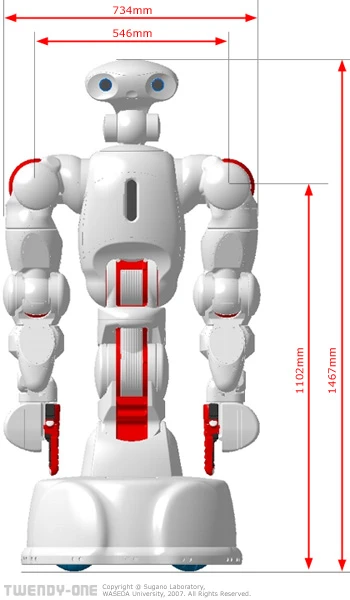
Twendy-One’s size and range of movement are designed to reflect those of the average adult female. It measures 1.46m (4.8 feet) high and 73.4cm (2 feet) wide. To overcome the limitations and difficulties of a bipedal design the developers of Twendy-One gave it an omni-directional wheel-based mechanism for mobility that allows the robot to move around efficiently even if the robot is in a narrow space. This mobile mechanism equips twelve ultrasonic sensors and a six-axis force sensor to detect objects and humans near the robot and avoid collisions.
Fingers and hands
To maximize dexterity Twendy-One’s four-finger-hand has 13 degrees of freedom. Although it has only four fingers the design of Twendy-One’s fingers is almost the same as that of a human in what the designers call a “bio-mechanism design”. The fingertip is made of soft material and it has a gentle curved surface and even a nail that allow it to pick up difficult small flat items like a coin.
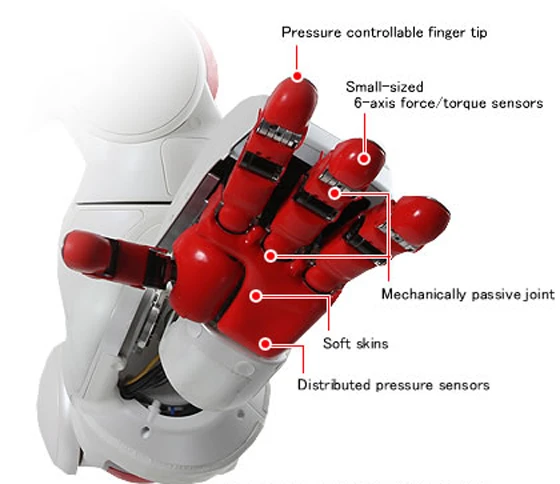
In the fingertip, a six-axis force sensor and distributed force sensors are installed allowing the TWENDY-ONE hand to grasp various objects such as soft plastic or paper cup stably and manipulate small objects such as a straw or a pencil freely and enable it to adapt to various shaped objects. Each hand contains 241 pressure sensors, while the palm of the hand is covered in a 108 and the fingers contain a further total of 133.
Arm
Twendy-One’s shoulder and elbow have four degrees of freedom with a small and lightweight passive impedance adjusting mechanism that enables TWENDY-ONE to adapt to an unfamiliar environment or material robot on the fly and also work together dynamically with a person. The robot can also follow human motion and avoid applying an unexpected force to a person. The force sensors installed on the surface of the whole arm also enable the robot to recognize if it is holding a human or another heavy object under its arm.
Trunk
The trunk of TWENDY-ONE has four degrees of freedom in total with high power actuators installed into the joints enabling it to pick up a heavy object on the floor and even support a human body weighing up to 35kg (77-lb) as they get out of bed or get up from a chair. It also provides enough flexibility to allow the robot’s hand to reach the floor to pick up an object or wipe up a spill. The robot’s backpack houses the whole body controller with LEDs on its chest displaying the internal condition of the robot.

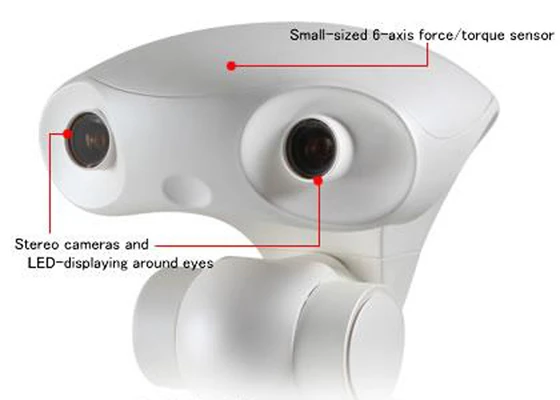
Head
Twendy-One’s head contains two CCD cameras surrounded by LEDs, a speaker, and a six-axis force sensor. The illumination of the LEDs shows the condition of the robot’s vision system, while the force sensor can detect a human touch of the head – possibly to allow people to give Twendy-One a tap on the head when it does a good job or supply a slap around the ears when it doesn’t. The head has three degrees of freedom - roll, pitch and tilt – allowing the robot to provide human-like feedback such as a tilt of the head to convey a question or lack of understanding.
Twendy-One is the result of 10 years of research by a team of researchers at Japan’s Waseda University led by Professor Shigeki Sugano along with the cooperation of more than 20 private companies. Although the robot was first unveiled in November, 2007, its developers intend to continue developing its capabilities so that a practical model is ready for release by 2015 – two years before the goal for such a robot set by Japan’s Ministry of Economy, Trade, and Industry (METI) and just in time to take care of me in my decrepitude.
Upon release the finalized robot is expected to cost between 10,000,000 and 20,000,000 yen (approx. US$110,350 to US$220,700)
Via Plastic Pals.





