
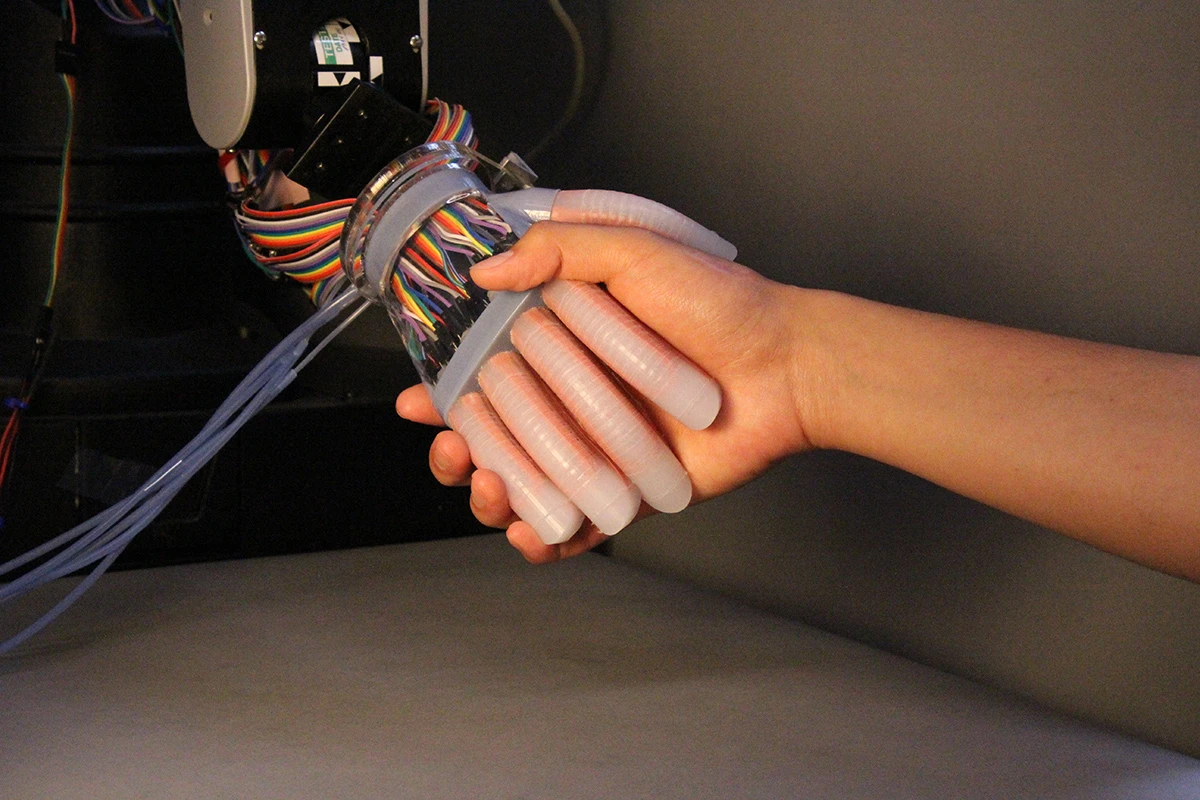
"Soft" and "gentle" are two words not often used to describe the grasp of a robot, but thanks to the work of a team of researchers at Cornell University, future androids may well have an especially delicate touch. Using extra-sensitive optical detectors built into a soft prosthetic hand, the researchers have demonstrated a prototype that is able to tell by touch whether fruit is ripe, or to modify the pressure exerted on a material simply in response to the way it feels.
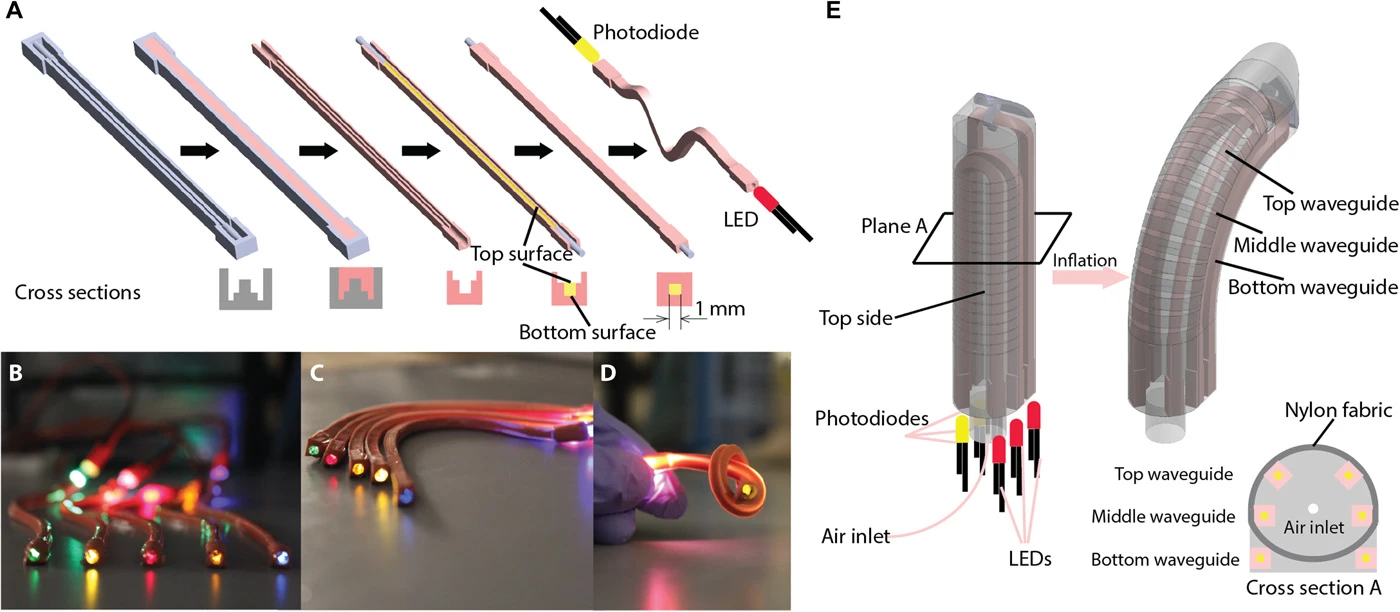
The prototype made use of a combination of LEDs and photosensors incorporated in bendable tubes (known as elastomeric optical waveguides) and used as detectors of curvature, elongation, and force. These were then embedded in a stretchable, soft artificial hand, allowing the researchers in the Organic Robotics Lab at Cornell to use these devices to electronically register a large range of feedback and control the hand accordingly.
"Most robots today have sensors on the outside of the body that detect things from the surface," said Cornell doctoral student Huichan Zhao. "Our sensors are integrated within the body, so they can actually detect forces being transmitted through the thickness of the robot, a lot like we and all organisms do when we feel pain, for example."
The creation of the artificial hand relied on a 3D fabrication technique that Cornell has successfully employed in making other artificial body parts. On this occasion, a four-step soft lithography process (somewhat like the method used by Harvard University to make a soft-bodied octopus robot) was added to create the core through which the light of an LED propagates, the cladding making up the outer casing of this waveguide, along with a housing for the photodiode that detects the light shining through the core.
When assembled, it is this combination of an LED shining on a photodiode that registers the reduction or increase in light as the tube through which it travels is bent. This is thanks to a phenomenon known as anisotropy, where the difference in light reflection strength between light shone on the atomically-smooth top section of the waveguide and on the atomically-rough lower section indicates the up and down position of the sensor.
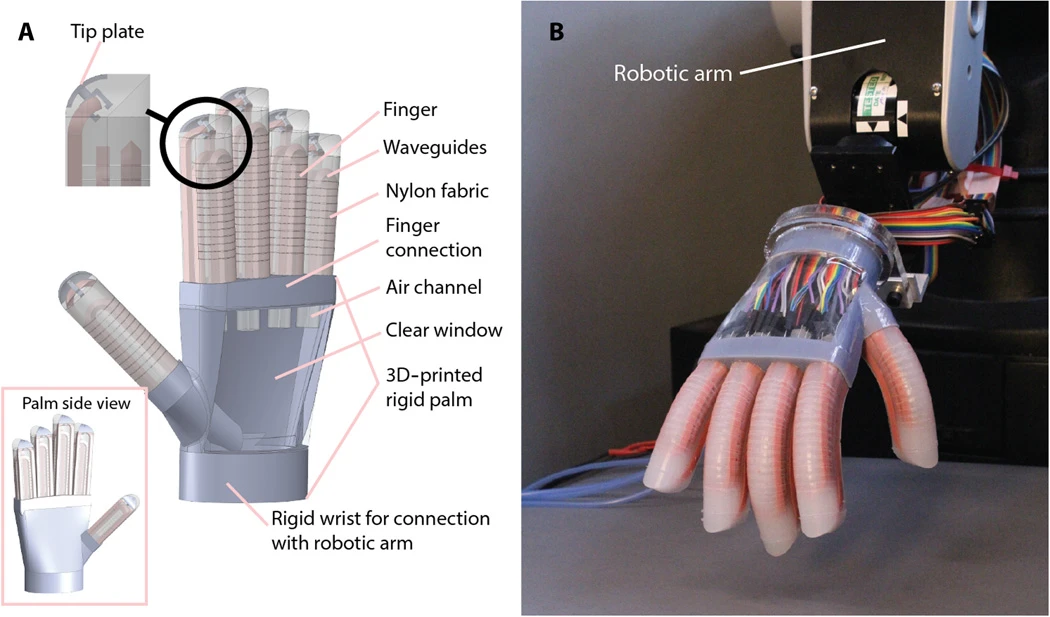
Three such elastomeric optical waveguide sensors are embedded in every finger of the prosthetic hand, with each having a slightly different method for detecting various types input, and providing appropriate feedback in response.
"If no light was lost when we bend the prosthesis, we wouldn't get any information about the state of the sensor," said assistant professor, and leader of the Organic Robotics Lab at Cornell, Robert Shepherd. "The amount of loss is dependent on how it's bent."
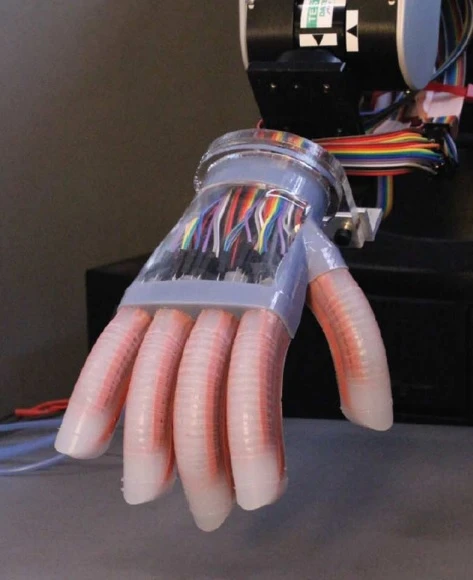
Made primarily from a range of silicone and polyurethane elastomers, along with some tough hydrogels (and used in other Cornell creations, such as their stretchy, squid-inspired, luminescent artificial "skin"), the four fingers and the thumb are pneumatically actuated and mounted on a 3D-printed rigid palm.
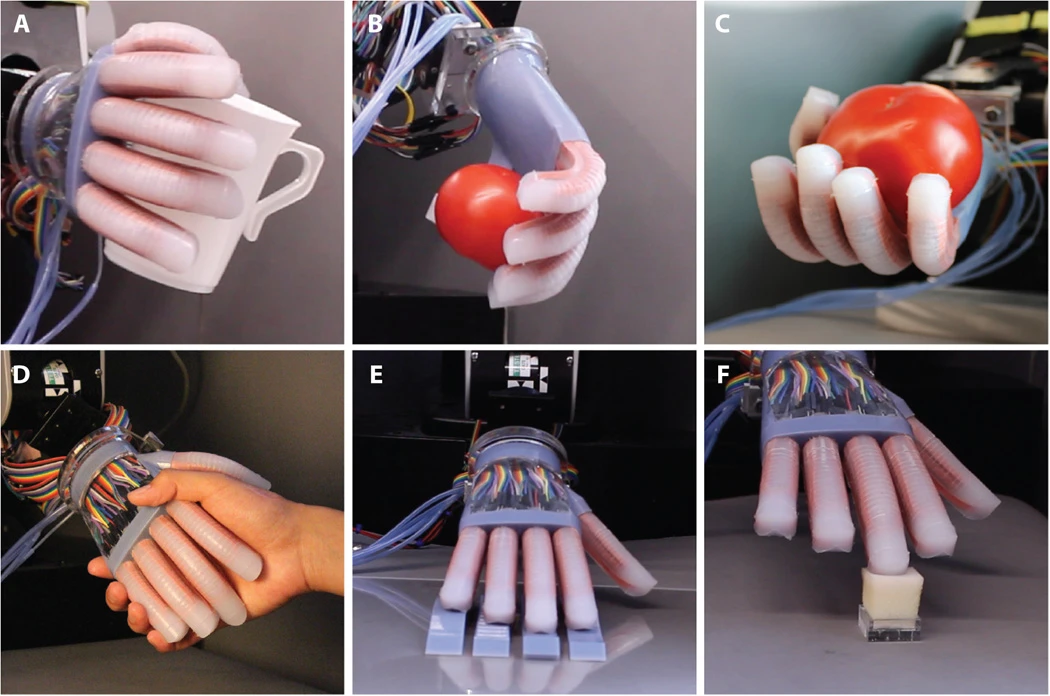
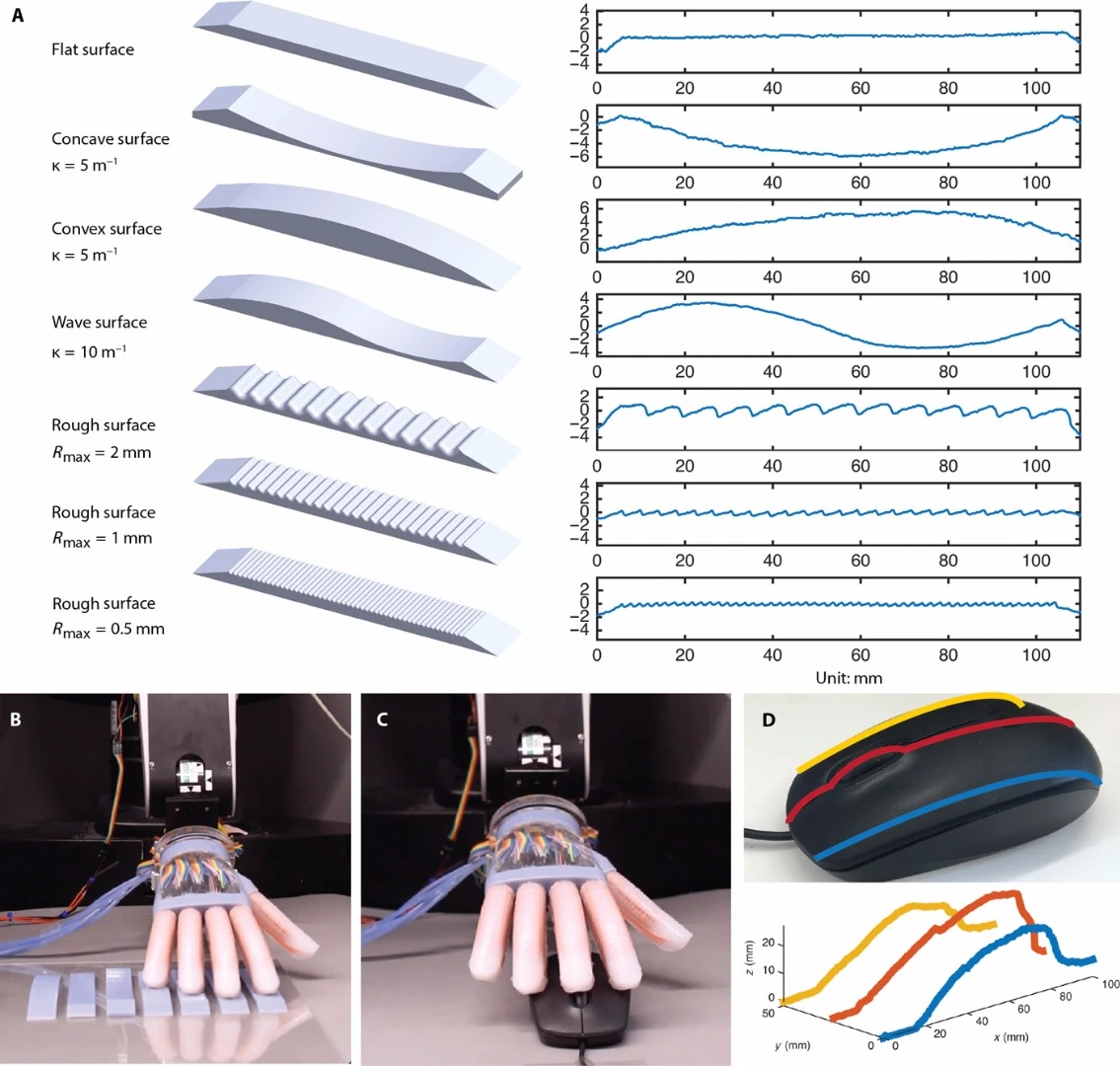
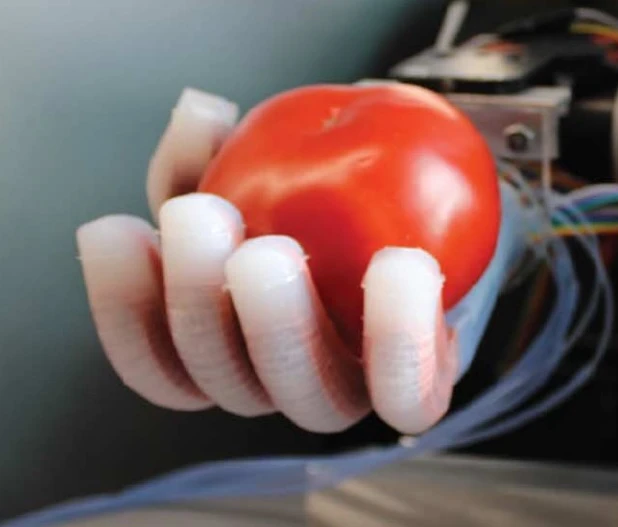
In this human-like form, the researchers used the hand to carry out a number of tasks, such as holding an object with an appropriate amount of pressure and feeling an object to determine shape and texture. In one particularly impressive feat, the prosthesis used a lateral-scanning, shape-reconstruction technique to ascertain the shape and location of three tomatoes and then determined, by softness, the ripest tomato of the three.
Still in an early stage of development, the research team does believe, however, that with further improvements the prosthetic hand may be a suitable artificial replacement for a human hand on an amputee, and a particularly sensitive and gentle manipulator for future soft-bodied robots used for close contact with humans.
The results of this research were recently published in the journal Science Robotics.
Source: Cornell University





