



If you’ve ever watched a fly trying to find its way around a house, you might have noticed that it didn’t take a particularly graceful approach – it probably bounced off a lot of windows and walls, until by process of elimination, it found a route that was clear. Well, researchers at Switzerland’s EPFL Laboratory of Intelligent Systems are taking that same approach with the latest version of their autonomous AirBurr UAV – it’s built to run into things, in order to map and navigate its environment.
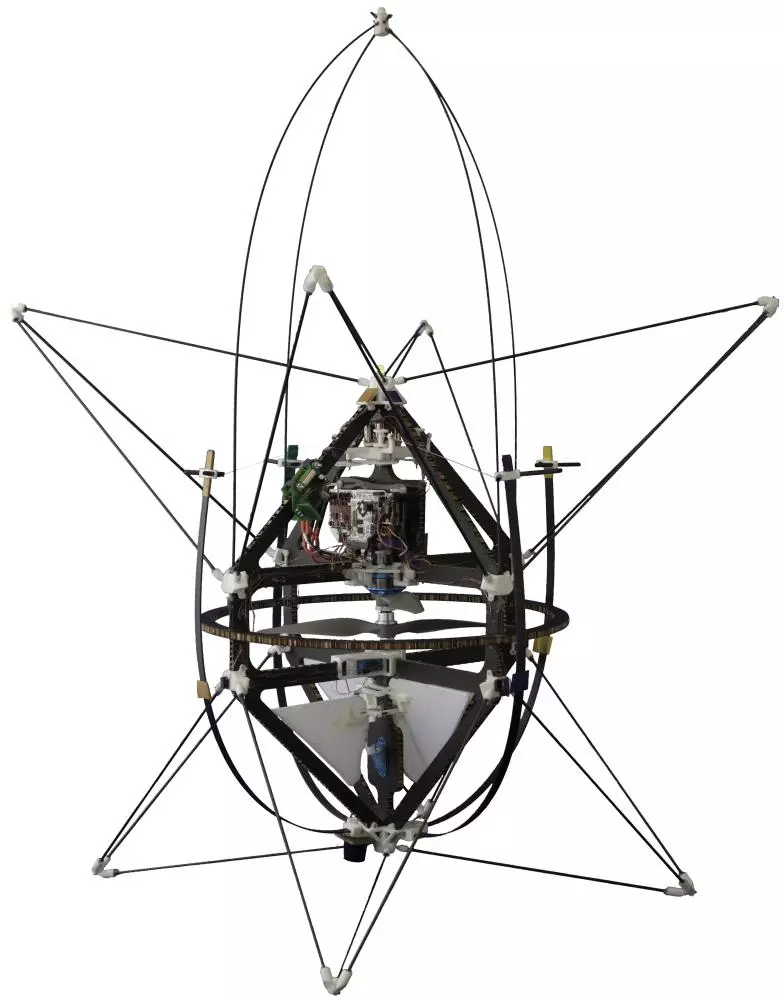
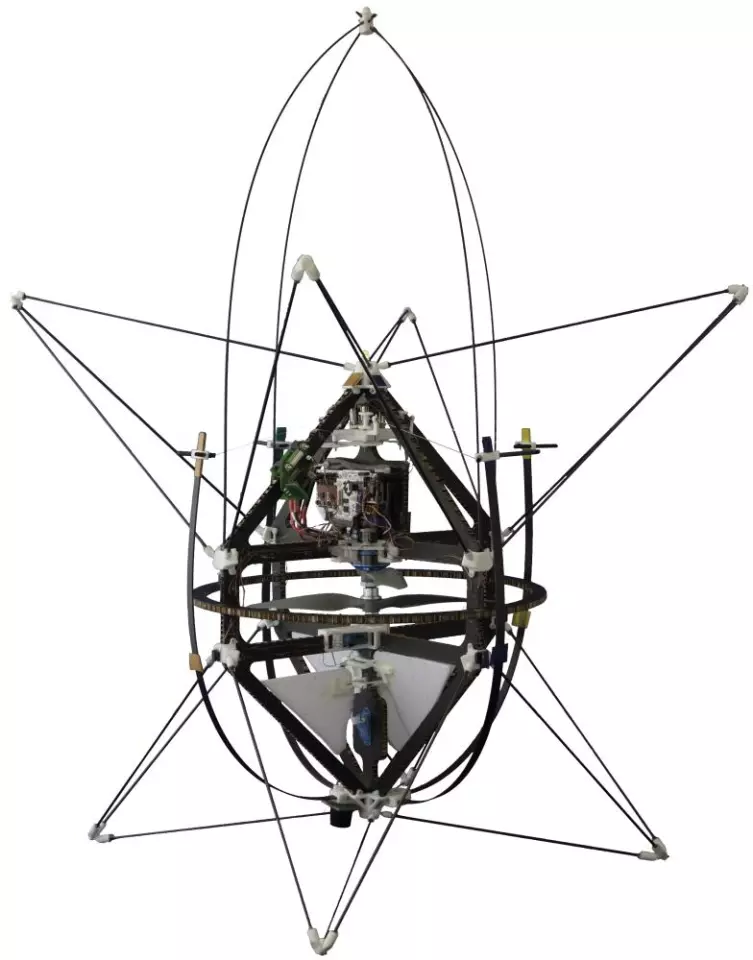
Like previous versions of the insect-inspired AirBurr, this one (Version 11) has its rotor blades, electronics and other delicate bits housed within an open, flexible carbon fiber frame. That frame offers protection in the event of a crash, but is bendable enough that it tends to give under pressure, instead of breaking.
When the UAV does get knocked down, it’s able to right itself by extending four retractable carbon fiber legs from its sides. Once the spring-loaded legs have propped it back up, it can take off again and resume its flight.
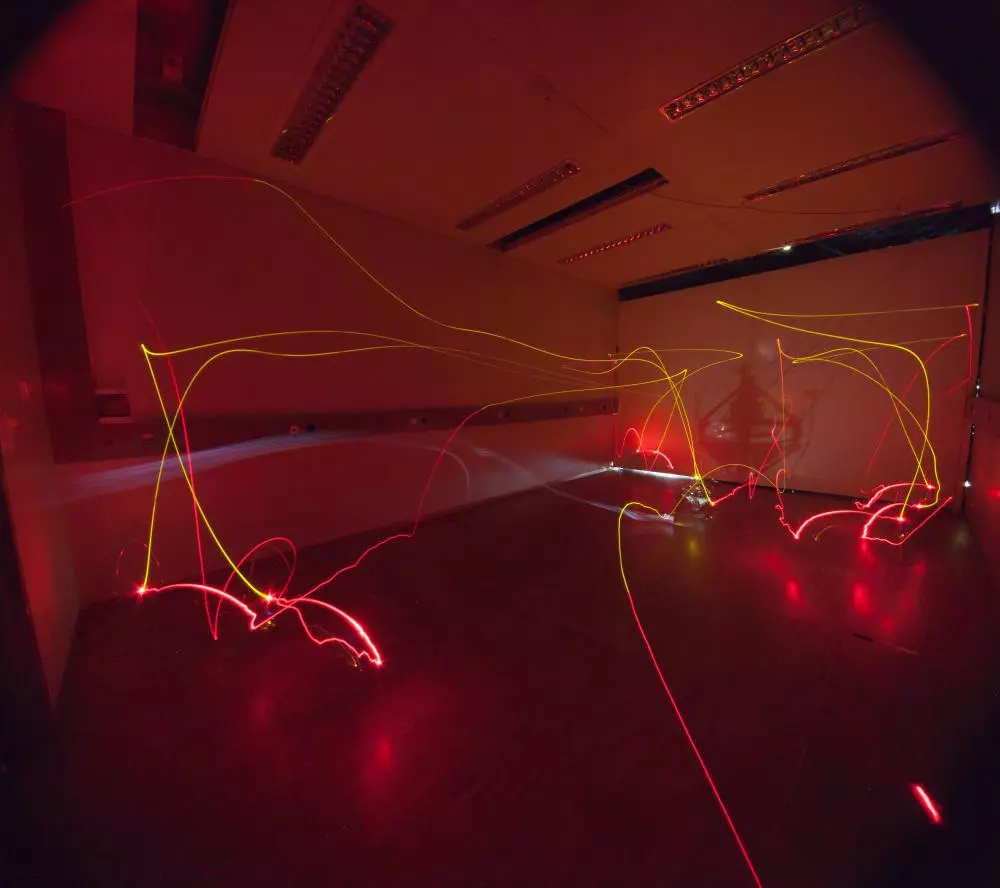
One of the things that’s new this time around, however, is its ability to learn from its crashes. By analyzing the position and force of its collisions, the AirBurr is able to gradually map out its surroundings, establishing where the various boundaries lie – it’s not unlike the random direction algorithm-based systems used by robotic vacuum cleaners, to learn the layout of the floor around them.
The UAV’s onboard sensors consist of just four photodiodes, to help when seeking out light sources. While a wider variety of sensors and accompanying algorithms might lessen its tendency to crash, they would also make the aircraft much more complex and thus expensive. Additionally, using its existing bump-and-crash method, the UAV has no problem navigating pitch-dark environments.
According to EPFL, this attribute could prove invaluable in the exploration of cramped and/or dark places such as caves, collapsed mines, or damaged nuclear power plants. The AirBurr’s ability to find its way also wouldn’t be affected by the presence of dense smoke, which can cause problems for laser-based navigation systems.
More information is available in the video below.
Source: EPFL via IEEE Spectrum


