


Engineers at Massachusetts Institute of Technology (MIT) have devised a smart way to help drones find their way through unlit indoor spaces autonomously, without costly night vision cameras. Instead, their solution relies on 'tags' placed in these environments that bounce radio frequencies from drones and help them determine their locations, and get around without bumping into obstacles.
That could come in handy for mapping and monitoring large indoor spaces like warehouses and tunnels, search and rescue operations, taking inventory and moving packages between stockroom shelves – all without the the need for human operators to have these drones in their line of sight.
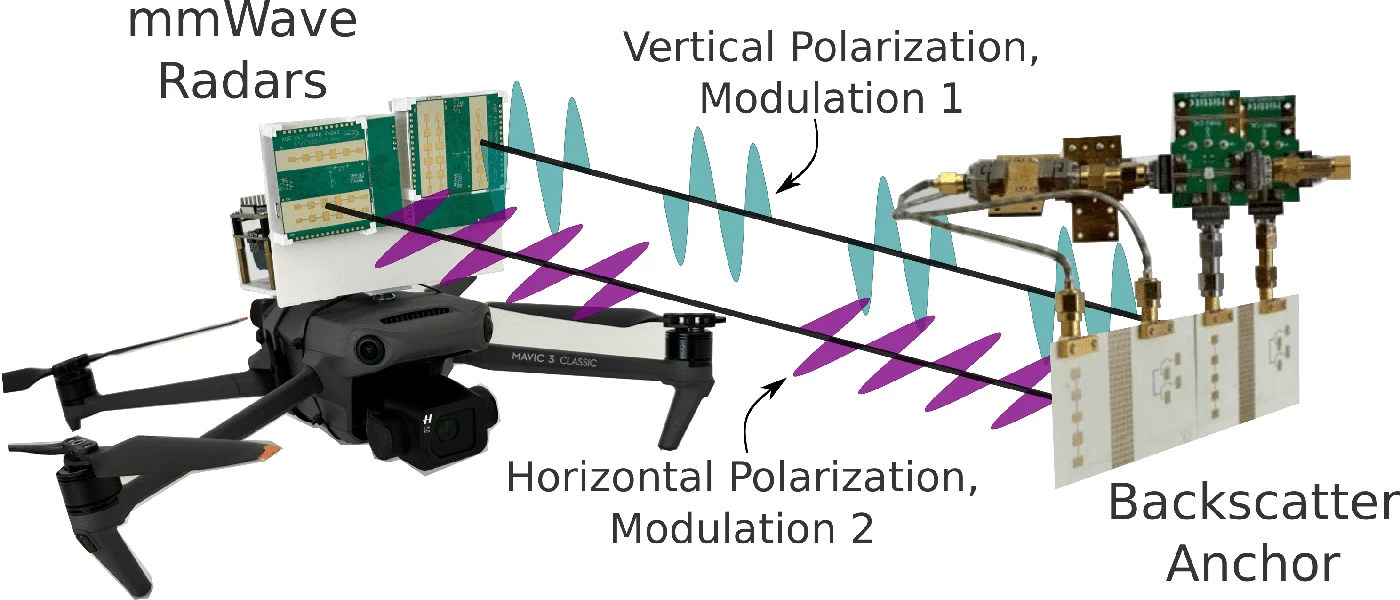
The research team's MiFly system uses a type of high frequency radio waves called millimeter waves (mmWave) bounced between a low-power 'tag' (technically a backscatter anchor) stuck on a wall in the indoor space, and a couple of radars attached to the drone.
The radars are designed to send and receive signals in a way that avoids interference. By separating polarized horizontal and vertical signals and using different modulation frequencies, the system manages to precisely locate the drone.
The system also gathers data from the drone's onboard Inertial Measurement Unit (IMU), which is like an internal compass and motion sensor that detects its orientation and lean angles. That informs the system about how much the drone is tilting in any particular direction, and accounts for that when pinpointing the drone's location.
It then combines the IMU data and radar signal data together for precise localization across the drone's six degrees of freedom, at accuracy up to 2.75 in (7 cm). Plus, this works even when the tag isn't in the drone's field of view, and up to 20 ft (6 m) away.
"We’ve looked beyond GPS and computer vision to millimeter waves, and by doing so, we’ve opened up new capabilities for drones in indoor environments that were not possible before,” says Fadel Adib, a senior author of the paper on MiFly.
This tech also works well in lit environments that don't have easily discernible features. That's got me thinking of the many long, empty hallways in Severance.
The researchers note that while their tech is already effective using a single tag, it can be made more effective across larger distances and spaces with improvements to the radar and antenna design. Their paper will be presented at the IEEE International Conference on Computer Communications in London this May.
Source: MIT



