




NASA astronaut Terry Virts, aboard the International Space Station (ISS), and ESA telerobotics specialist André Schiele, in the Netherlands, made space history this week with the first telerobotic "handshake" between space and Earth. Using special force feedback joysticks that acquire force data and create the sensation of pressure, Virts and Schiele brought the agencies closer to allowing astronauts in remote locations to naturally and safely control robotic devices and perform potentially dangerous or otherwise impossible tasks.
In the test, both Schiele and Virts pushed on the joystick, while the other felt the same force echoed through their own joystick, 5,000 miles (8,046 km) away. Schiele said that “[i]t felt as though Terry was extending his arm down from space to shake my hand.”
The feat wasn't just an accomplishment of testing the joysticks themselves, though that was done earlier this year on the ISS. It also provided proof of concept of the data transmission algorithms, which handle the ISS being in constant movement, as well as accounting for fluctuation in transmission speeds.
As Virts manipulated his joystick, that data had to bounce from the ISS to a satellite, through mission control in Houston, USA, and finally across the Atlantic to the Netherlands, where ESA’s technical center is located. This process created a latency of about 0.8 seconds in each direction. In comparison, controlling the Rover on Mars from Earth can take about 12 minutes for commands to process.
While the fear is that packet loss or a slowdown in data transfer could create unsafe or erroneous forces, this is modulated by more software. To aid in creating a visualization of what is happening at a great distance, Virts also had real-time video of Schiele and his screen had an augmented reality overlay of the direction and magnitude of the force.
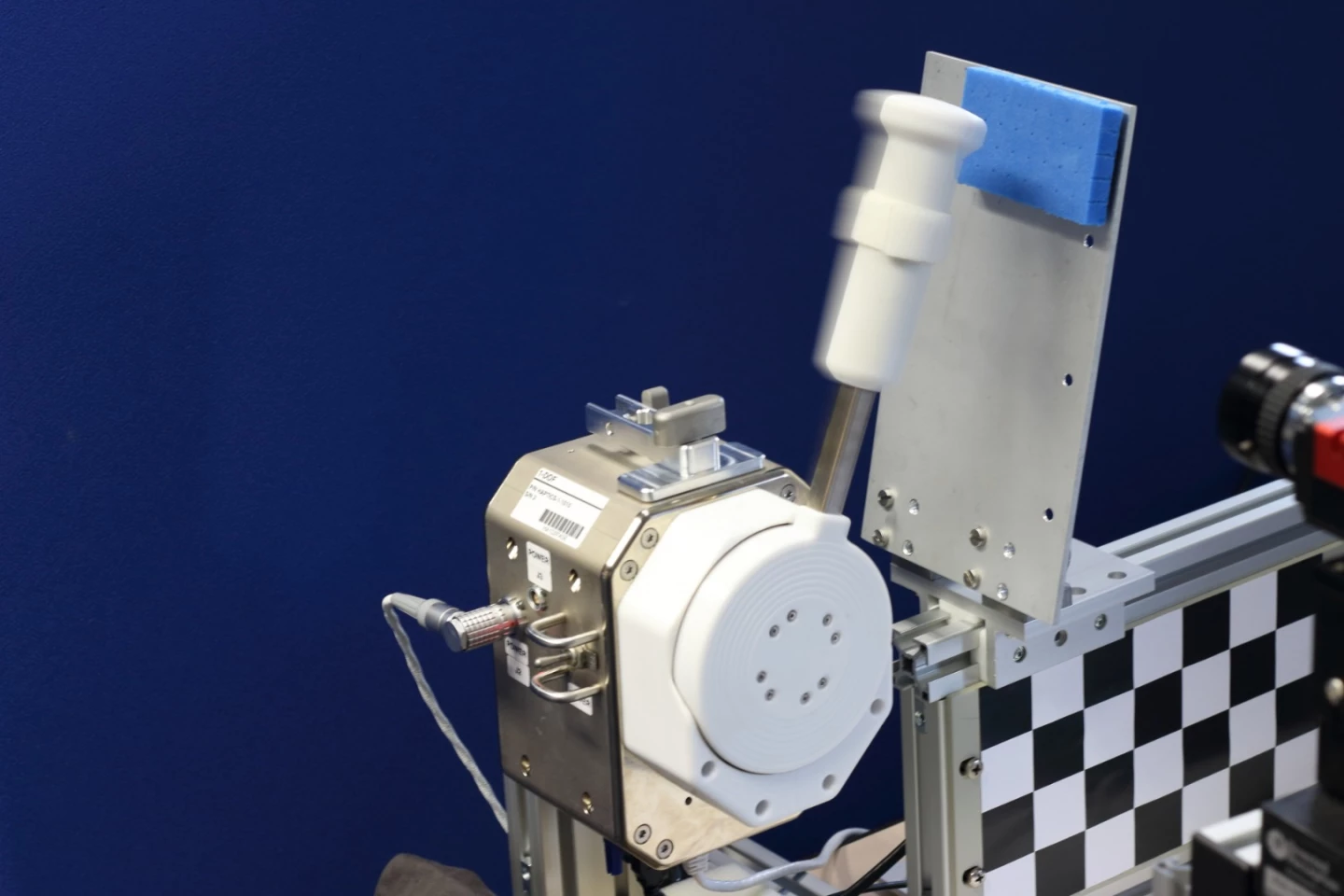
Future experiments will involve blind tests using foam and metal to see if astronauts using the system can discern the stiffness of various objects.
A future scenario might see space agencies moving away from rovers and instead placing astronauts in orbit around a planet and allowing them to use telerobotic controllers to manipulate a robot on the planet's surface, where the environment may be unsafe or at least unknown.
In such a situation, not only would the astronaut be able to control a robot remotely, but would receive tactile feedback on the resistances and forces from the objects the robot encounters, providing a realistic and more accurate interaction with the environment.
Advances in telerobotic systems using haptic feedback may also be used on Earth in remote, dangerous or extreme conditions.
Source: ESA


