

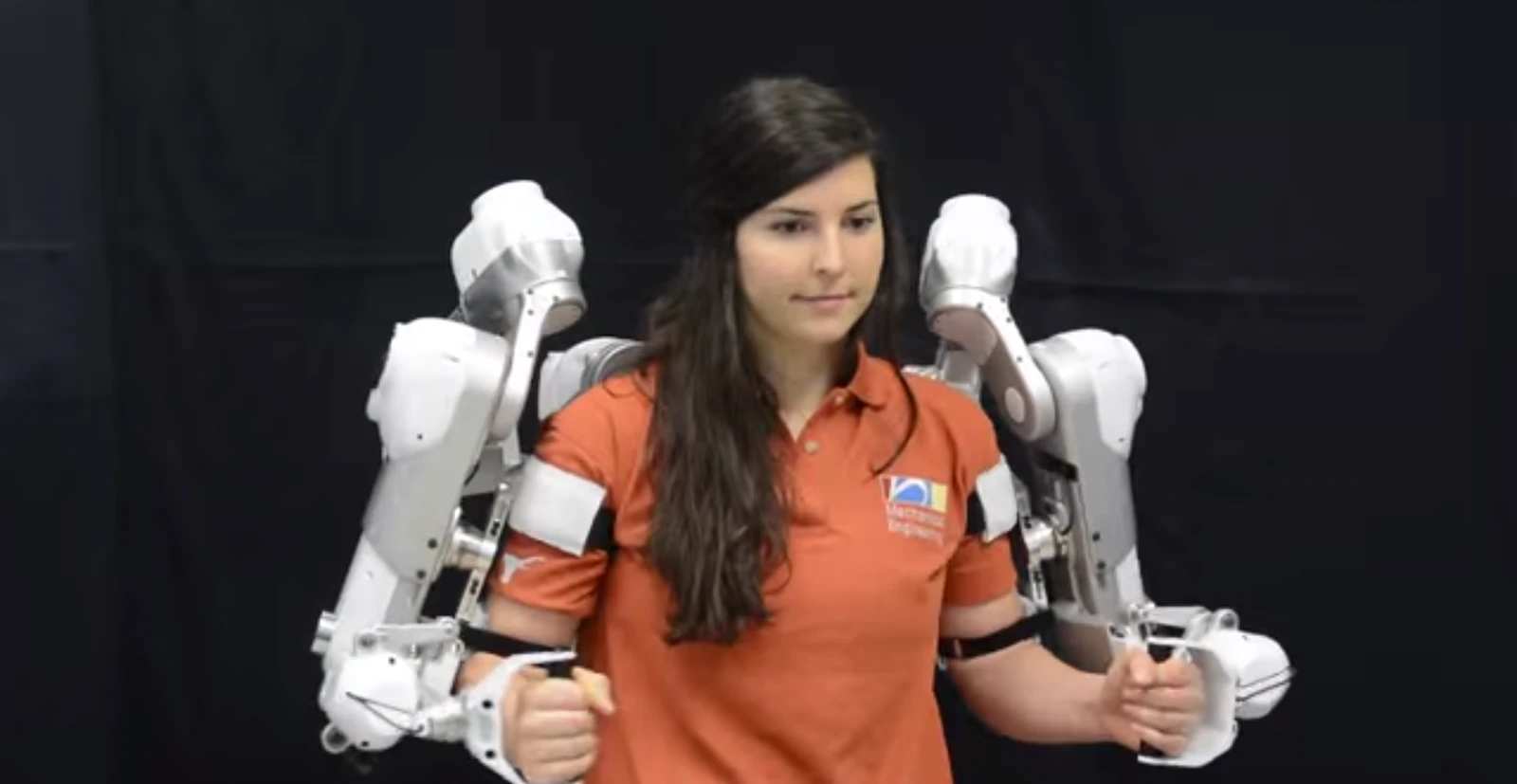

Until now, rehabilitation exoskeletons have generally been one-armed, and haven't been of much help in providing the sort of two-arm training that many patients need to recover coordination for carrying out daily tasks. Researchers at the Cockrell School of Engineering at the University of Texas at Austin have now developed Harmony, a two-armed, robotic exoskeleton that uses mechanical feedback and sensor data to provide therapy to patients with spinal and neurological injuries.
Under development since 2011, Harmony is the result of a collaboration between mechanical engineering researcher Ashish Deshpande and graduate students from the Rehabilitation and Neuromuscular Robotics Lab. Its purpose is to provide full upper-body therapy with a high degree of natural motion, so patients can learn how to do things most of us take for granted, such as eating and dressing ourselves.

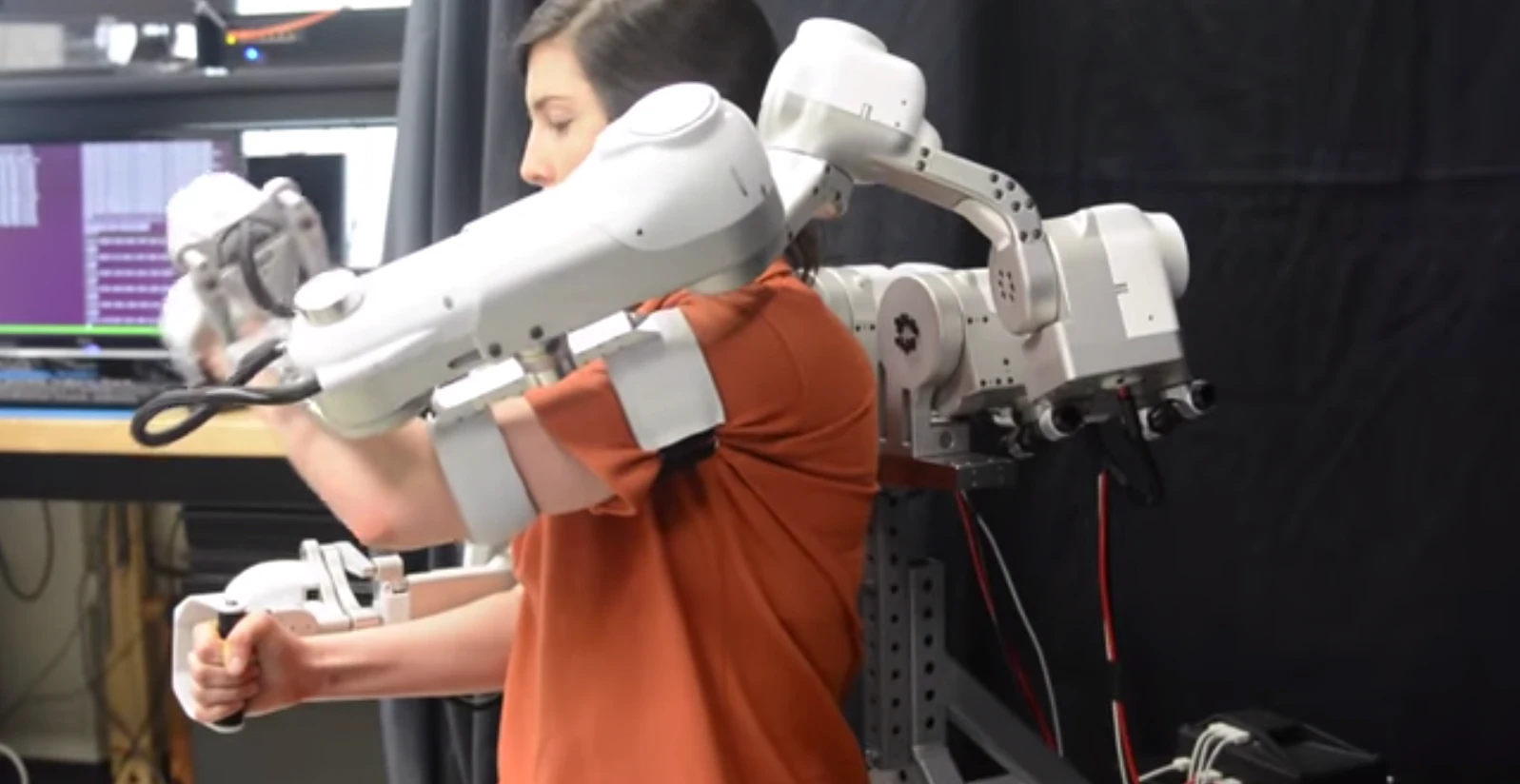
Harmony fits the entire upper body, connecting to the patient in three places. The exoskeleton has 14 axes of movement and a shoulder joint that helps with natural, coordinated movements, such as the scapulohumeral rhythm, which is an important rotational motion of the upper arm, shoulder and back that is important for long-term joint stability. In addition, the exoskeleton has tunable pressure and force, so it feels weightless when worn.
Another feature of Harmony is its suite of sensors designed to record data at a rate of 2,000 times per second. The data is recorded and used by harmony's software to instantly modify how the robotic system interacts with the patient.
In addition, the software lets the medical team provide precise therapy, as well as trackable data about the therapy. As the therapy progresses, Harmony can use its high levels of force and torque control to correct the patient's movements, provide guided exercises that gradually increase in difficultly, and chart their progress.

"Harmony is the culmination of years of research and development in the ReNeu Robotics Lab," says Deshpande. "It was specially designed to offer customized therapy for optimal efficacy. Not only does the exoskeleton adjust to patient size, it can also be programmed to be gentle or firm based on the individual’s therapy needs."
The hope is that Harmony will be able to reduce recovery times by providing bespoke care. According to the team, the project is moving out of the building phase and will now concentrate on trials, which will begin with healthy subjects in June, and the eventual inclusion of screen interfaces or games to help with recovery by providing stimulation to combat boredom and provide motivation during sessions.
The video below discusses the Harmony robot.
Source: University of Texas






