

It's tricky to routinely inspect jet engines and other machines without taking them apart, which is a costly and time-consuming process. Now, a team at Harvard's Wyss Institute has developed small, insect-like robots that can climb inside and through machines to inspect them, saving the trouble of pulling them apart if there's nothing that needs fixing.
The robots are based on the team's previous creation, which they call the Harvard Ambulatory Micro-Robot (HAMR). These small, four-legged robots scurry around like insects, and a more recent version gained the ability to walk across the surface of water.
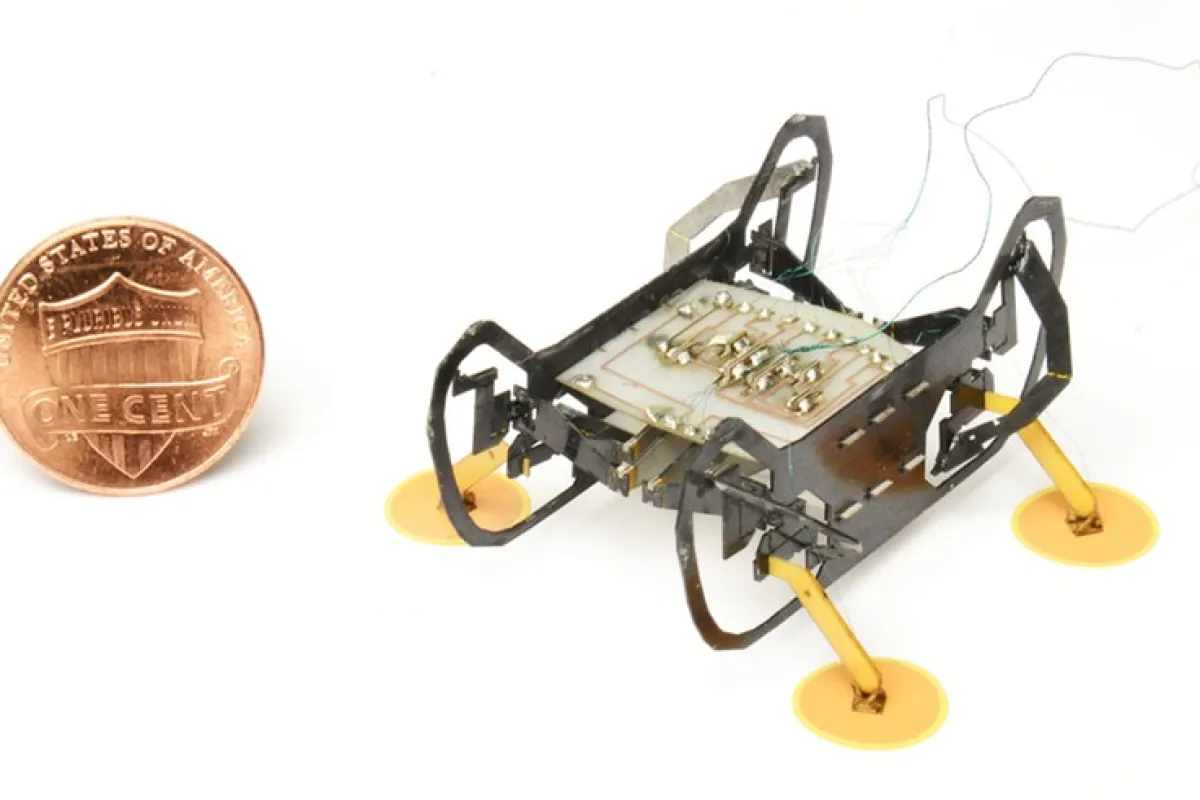
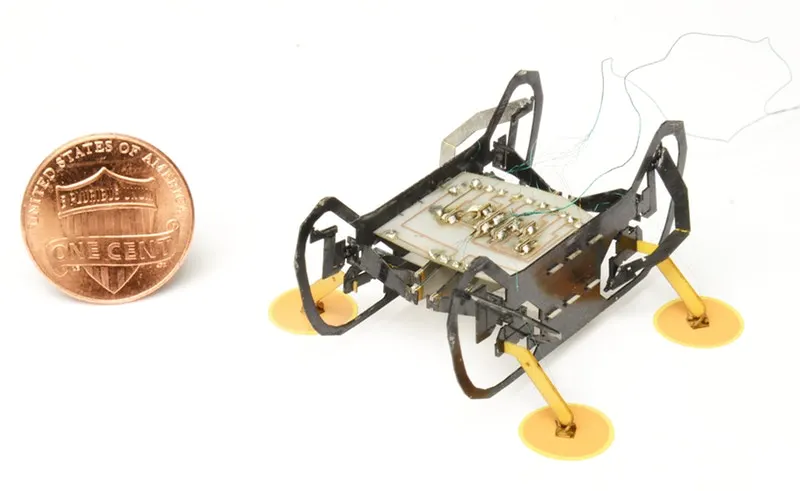
The latest model has been named HAMR-E, where the E stands for Electro-adhesion. To climb vertical surfaces and cling upside down, the robots have new footpads that stick to the metallic surfaces through electrostatic forces. The pads are made of a polyimide-insulated copper electrode, and the robots can switch the electric field off to lift each foot off the surface, before turning it back on when it takes the next step. These pads are also flexible, so as to let the bots climb curved surfaces – a handy skill, inside a jet engine.
"Now that these robots can explore in three dimensions instead of just moving back and forth on a flat surface, there's a whole new world that they can move around in and engage with," says Sébastien de Rivaz, first author of a study describing HAMR-E. "They could one day enable noninvasive inspection of hard-to-reach areas of large machines, saving companies time and money and making those machines safer."

The electro-adhesive footpads aren't the only improvement needed to get these new robots climbing. The team also designed new ankle joints that can roll in three dimensions, keeping the robot's orientation in line with the terrain. It also needed a new gait, to make sure only one foot is lifted at a time, while the other three stay firmly planted to the surface so it doesn't fall off.
In tests, the HAMR-E was able to walk over 100 steps in a row on vertical and upside-down surfaces without falling off. It also demonstrated how it could climb around the curves of a jet engine, even upside down, with its footpads compensating for uneven surfaces by increasing the voltage of its electro-adhesion.
The next steps for the team are to include sensors to improve HAMR-E's stickiness on surfaces, and give it a working payload so it can actually conduct the inspections it's so well suited to. It's unlikely the little bots would ever be able to carry out the repairs, but they should save time and money by keeping machines from being disassembled when they don't need any work done.
"This iteration of HAMR-E is the first and most convincing step toward showing that this approach to a centimeter-scale climbing robot is possible, and that such robots could in the future be used to explore any sort of infrastructure, including buildings, pipes, engines, generators, and more," says Robert Wood, corresponding author of the study.
The research was published in the journal Science Robotics.
Check out the HAMR-E in action in the video below.
Source: Harvard





