



Though clearly inspired by the snake, a new soft robot out of Harvard takes cues from another fascinating source: the ancient Japanese paper craft kirigami. Unlike origami, kirigami uses cuts rather than folds to achieve the desired result. Here the Harvard team applied the artform to create a soft robot that grips the ground much like a snake.
Of course, this is far from the first time robots have drawn inspiration from serpents. Compare Stanford's growing rescue robot and Eelume's underwater maintenance robot as just two examples from recent years. We've seen the application of kirigami in solar cells and graphene nanotechnology, too; but to to our knowledge this is the first combination of the two.
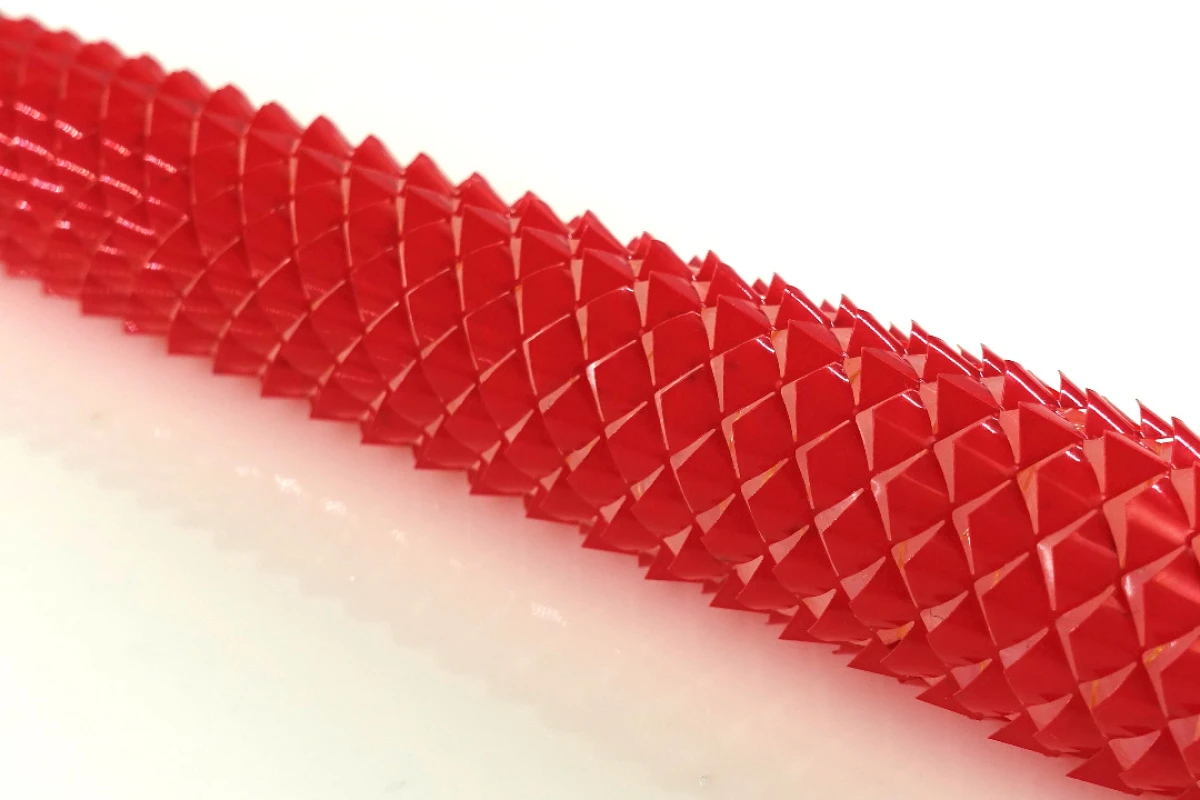
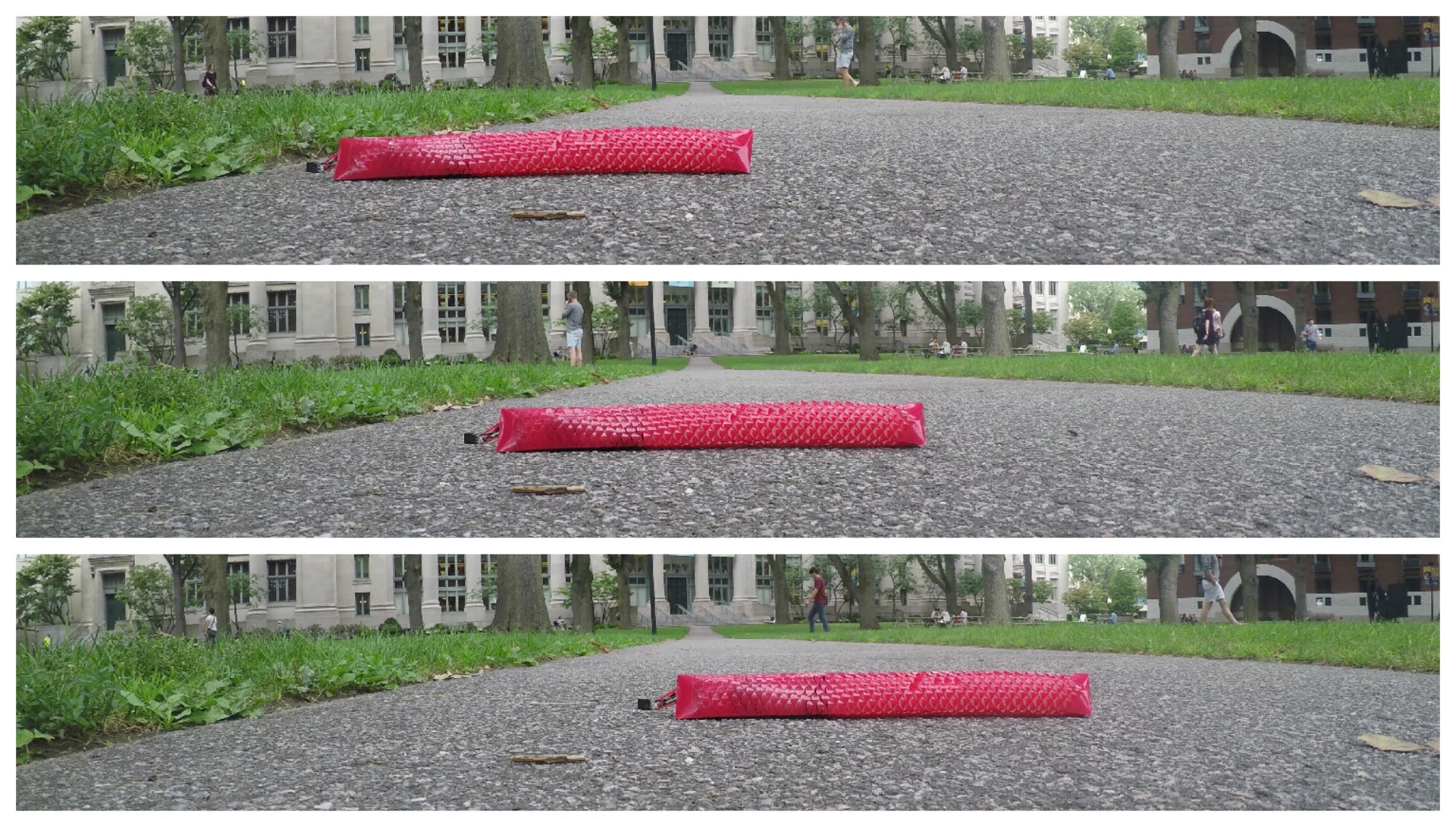
The key to this robot's movement is its "skin." When stretched, its outer surface adopts a more three-dimensional texture better suited to gripping the ground. It's the gripping of the ground that is snake-like rather than the way the robot moves.

"We have shown that kirigami principles can be integrated into soft robots to achieve locomotion in a way that is simpler, faster and cheaper than most previous techniques," says Ahmad Rafsanjani, of the Harvard John A. Paulson School of Engineering and Applied Sciences.
The simplicity comes from the fact that the robot needs only a single motor to move, unlike similar soft robots which require several. The skin, and hence this cutting edge application of kirigami, is what makes this possible. The skin's inherent grip that makes the robot want to move forwards.
Cutting edge
The researchers used a laser cutter to create a series of small cuts in a sheet of plastic. The sheet was then wrapped around an expanding silicone tube which can be inflated and deflated. When inflated, the cuts pop up and grip the ground. When deflated, the robot is launched forwards. The tube was itself wrapped with Kevlar fiber to keep the robot in shape.
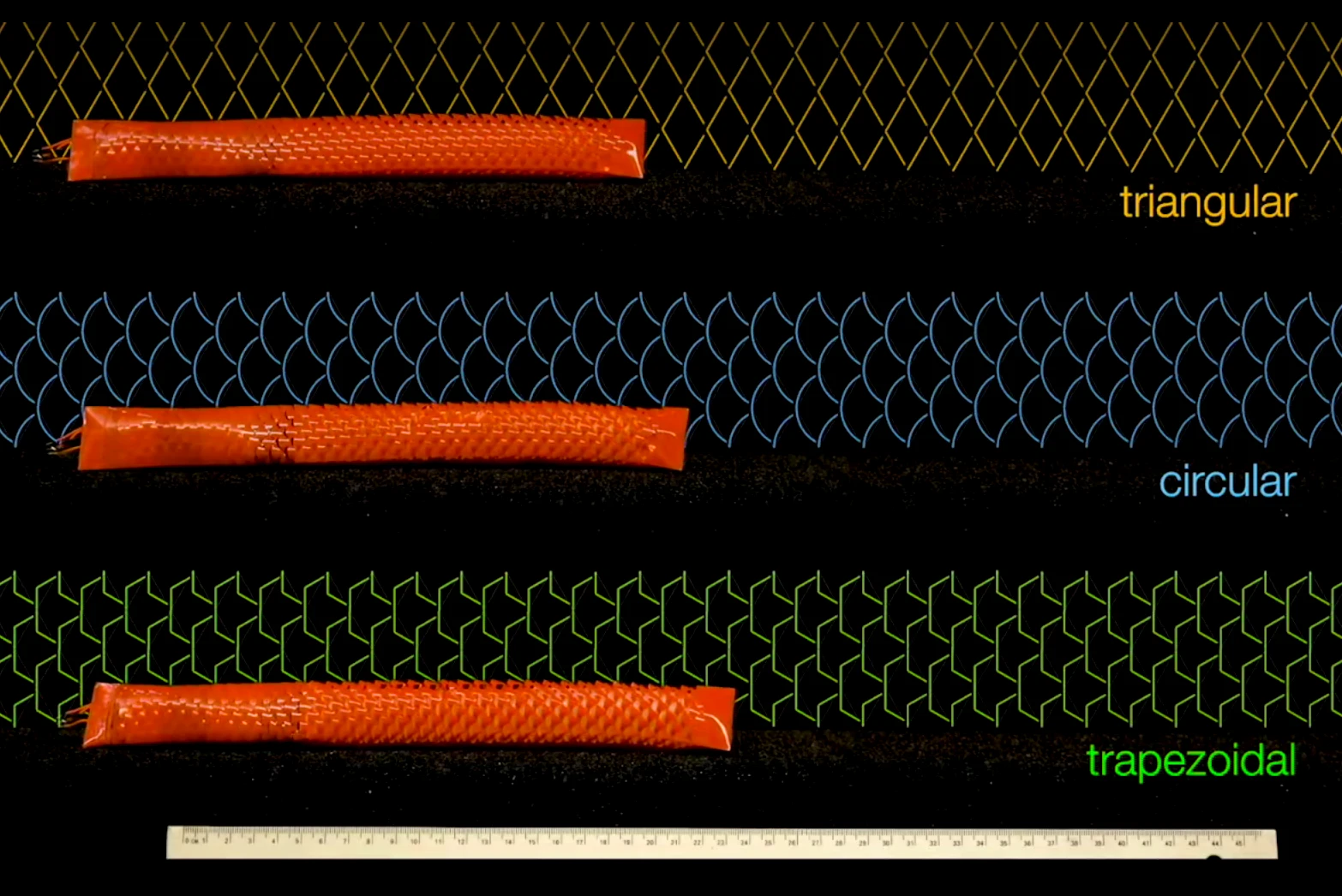
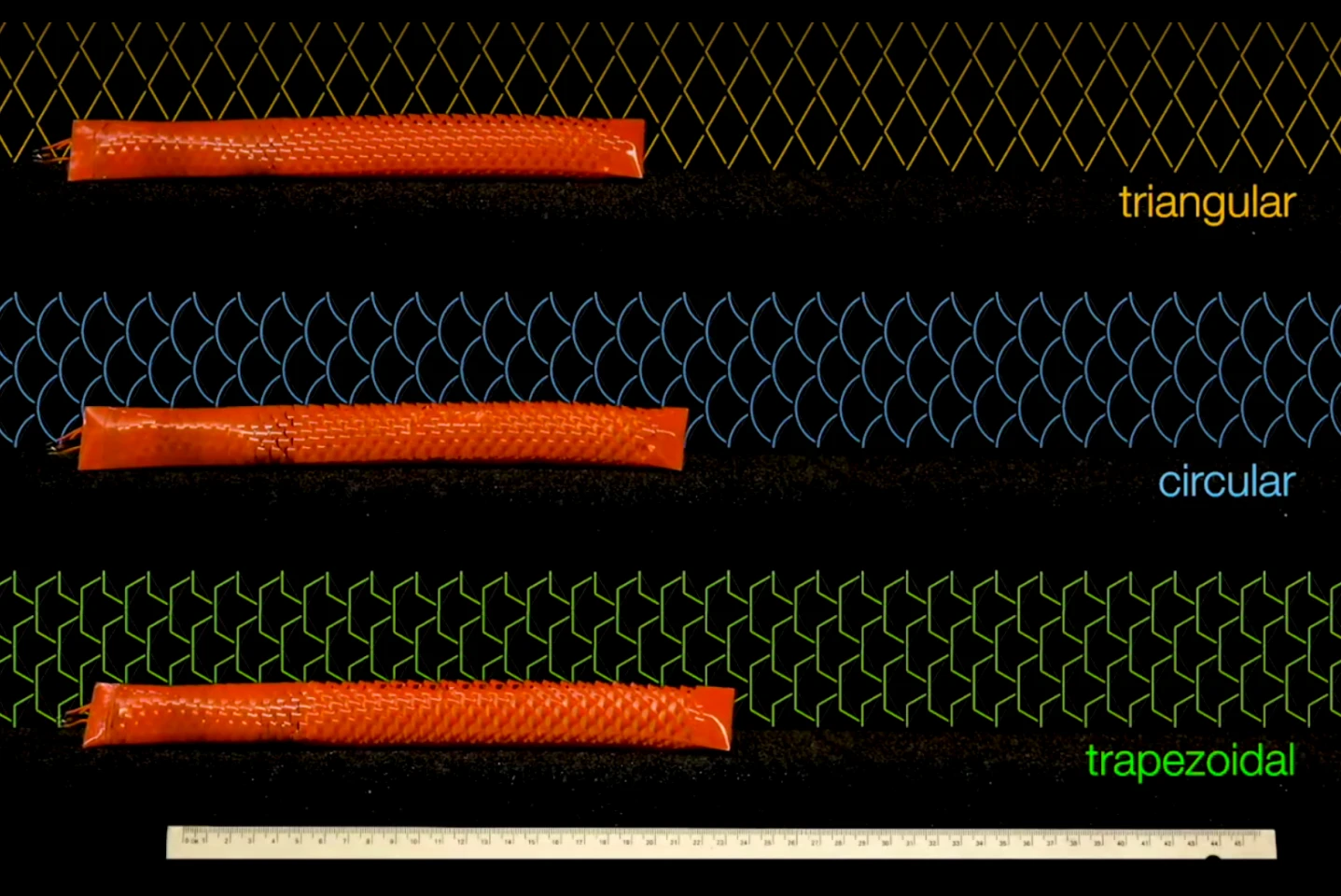
The team experimented with different shape cuts to find the best results. After triangular and circular cuts, the team settled on trapezoid scales which, surprise surprise, are closest to actual snake scales. These create a rougher surface which affords more grip.
The team experimented with both tethered and untethered prototypes. In the tethered variants, the cord was used to supply air to inflate the crawler. But to make final versions fully autonomous, the tail was packed with a power supply, controls, actuators and sensors.
It's hoped that soft robots like Harvard's could be used to explore tricky and dangerous terrains for exploration or search and rescue, or, if the technology can be miniaturized, for difficult invasive medical procedures.
The team's research, Kirigami skins make a simple soft actuator crawl, has been published in Science Robotics. Its senior author was Katia Bertoldi, and co-authored by co-authored by Yuerou Zhang, Bangyuan Liu and Shmuel M. Rubinstein.
You can see a video of the crawler in action below.
Source: Harvard University





