
What do deep space exploration and underwater work have in common? Quite a bit, actually. Adapting a laser system called Lunar Laser Communication Demonstration (LLCD) that was used in 2013 to transmit data between lunar orbit and the Earth across a distance of a quarter of a million miles at a rate of 622 megabits per second, MIT's Lincoln Laboratories is developing a way for underwater workers and machines to communicate more effectively with one another.
The sea is one of the last great frontiers, but, in many ways we're still not much past the paddling in the shallows stage. One instance of this is communications, where staying in contact with submersibles, and unmanned underwater vehicles means either using wire tethers, mechanical versions of what is essentially shouting, or very short range optical systems.
The problem is that water is hostile to electromagnetic communications. Submarines, for example, are restricted to either coming up to the surface to raise a radio antenna, or trailing a long sensor array to pick up very low frequency radio signals that have a phenomenally low data transmission rate.
In some ways, the problem of setting reliable, high-speed data links underwater is similar to that of high-speed communications with deep-space probes over distances of hundreds of millions of miles. With this in mind, scientists at Lincoln Laboratories, who developed LLCD in conjunction with NASA for space missions, are developing a narrow-beam laser version of the system suitable for underwater use.
According to MIT, laser communication or lasercom isn't ideal for underwater work because even the clearest water absorbs and scatters laser light. Add in plankton and other suspended debris and the problem becomes serious. Currently, optical and laser communication systems use a wide-angle beam that manages a link, but only at short range and with small data exchange rates.
What's needed is something that can link two vehicles at a rate that is 10,000 times better than present systems. It also must be one that isn't dependent on GPS for determining where the receiver is.
"Underwater vehicles rely on large, costly inertial navigation systems, which combine accelerometer, gyroscope, and compass data, as well as other data streams when available, to calculate position," says Thomas Howe of the research team. "The position calculation is noise sensitive and can quickly accumulate errors of hundreds of meters when a vehicle is submerged for significant periods of time."
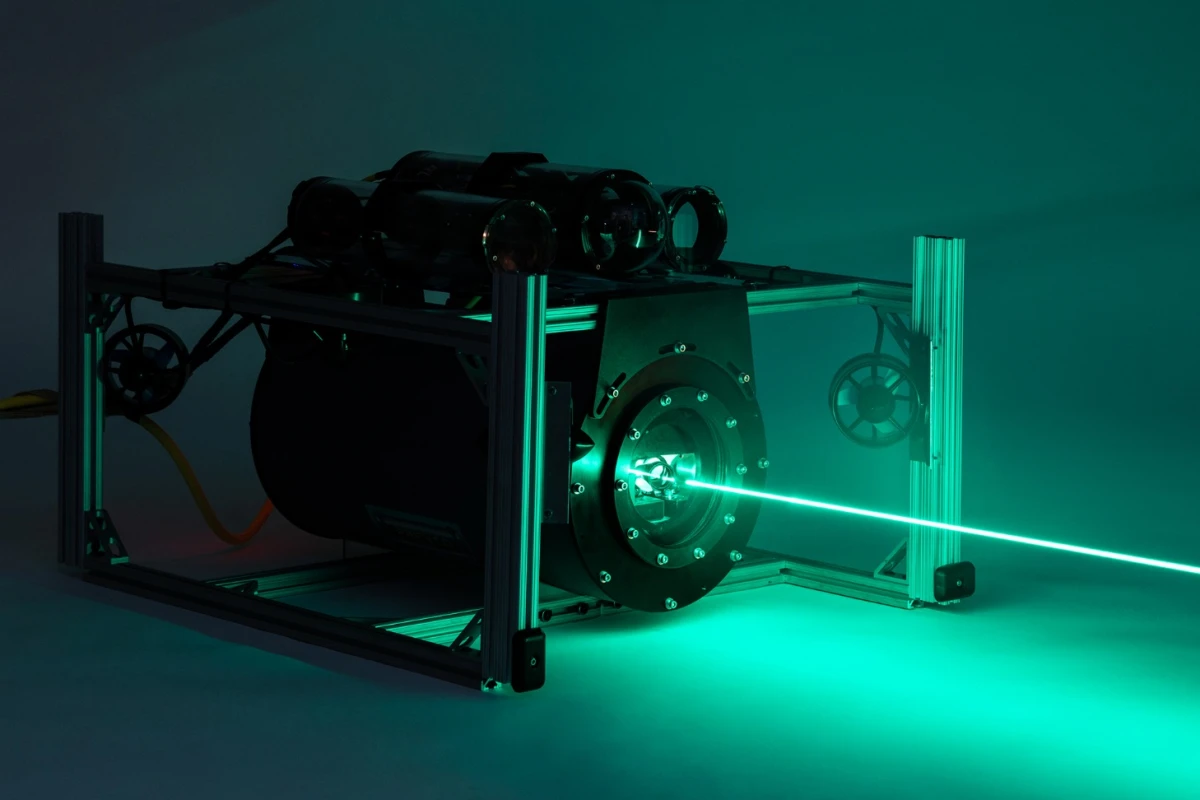
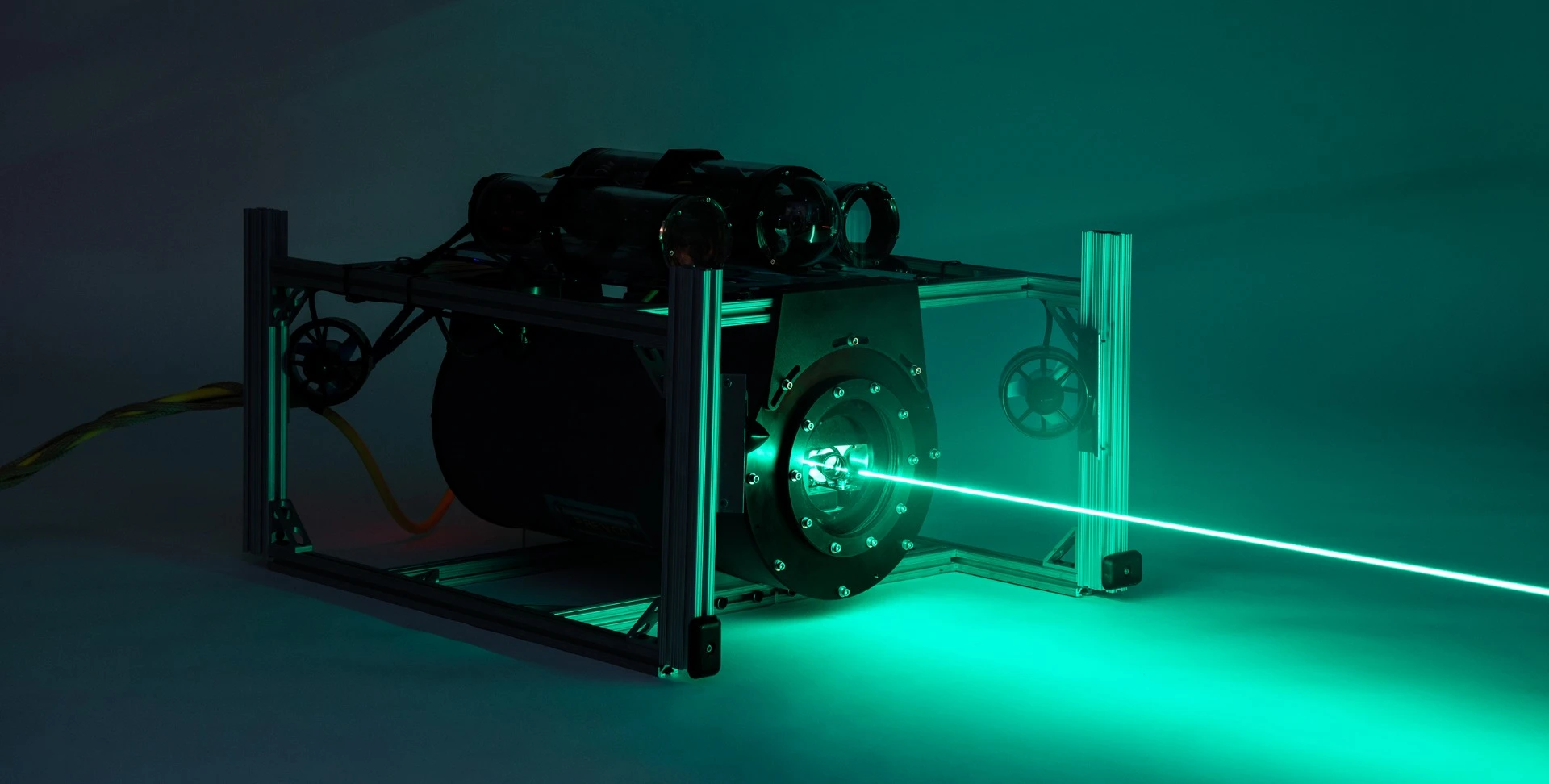
The MIT system instead relies on a scanning function to seek out and acquire the underwater target using narrow optical beams. Once the target is acquired, the system locks on and the two vehicles can locate, track, and transceive with one another with great precision using wide bandwidth and a precision of a few centimeters.
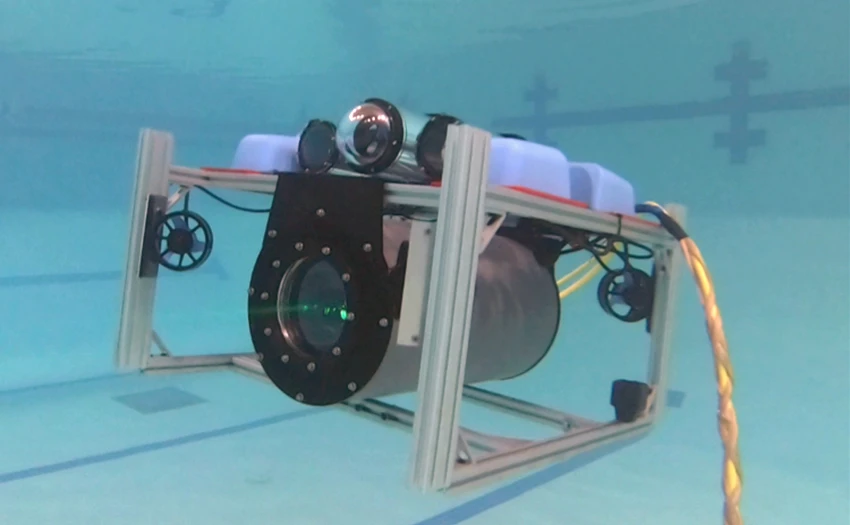
So far, the system has been used in the controlled and benign environment of the Boston Sports Club pool in Lexington, Massachusetts, where two underwater vehicles located and locked onto one another in under one second. The resulting link could handle hundreds of gigabytes.
MIT says that the next step will be to demonstrate the potential of the system to the US Navy in the ocean, with a second test involving a link between a surface vessel and an underwater target – something that hasn't been managed with a laser system before. The hope is to one day use integrated blue-green optoelectronic technologies, gallium nitride laser arrays and silicon Geiger-mode avalanche photodiode array technologies. Eventually, this will result in megabit-to gigabit-per-second transfer rates that can operate over hundreds of meters in clear ocean waters.
"High-rate, reliable communications could completely change underwater vehicle operations and take a lot of the uncertainty and stress out of the current operation methods," says Howe.
Source: MIT


